
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 一、工具数据
工具数据包括装在机器人第六轴法兰盘上的工具的重量、重心位置、工具中心点(即TCP)的坐标位置等参数数据。这些信息是机器人夹持工具后正确作业的重要数据。
一般不同的机器人应用配置不同的工具,比如说弧焊机器人就使用弧焊枪作为工具,而用于搬运玻璃的机器人就会使用吸盘式的夹具作为工具。
1 设定工具数据
工具的重量:
工具的重量和重心位置是机器人主动修正转动惯量的依据,以保证机器人正常动作。
•工具重量可以称重或者根据标重结果直接输入到工具参数中。
2 设定工具中心的位置
默认工具中心点(Tool Center Point)位于工业机器人法兰盘中心。下面两幅图片,左边为带有末端执
行器的工业机器人工具中心点位置,右边为工业机器人原始的工具中心点位置。

3 建立工具坐标系
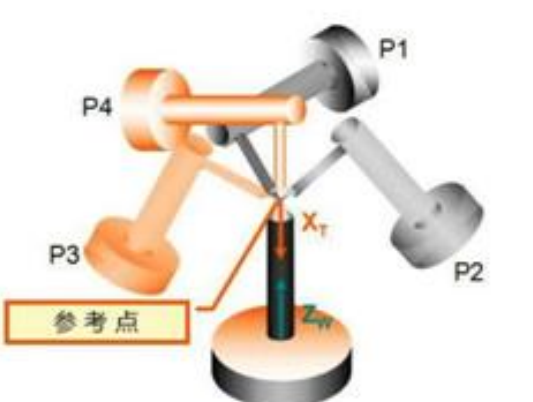
4点法(可以定出TCP点相对法兰中心的位置)
TCP相对于某参考点的四种最大差别的姿态
5点法(进一步定出TCP点方向)
在4点法的基础上增加一个X轴负方向延展方向的点
6点法(提高工具坐标精度)
在4点法的基础上增加X轴负、Z轴负方向延展方向的点
-------6点法设定步骤
1)首先在工作范围内找一个非常精确的固定点作为参考点。
2)然后在工业机器人已安装的工具上确定一个中心(TCP)。
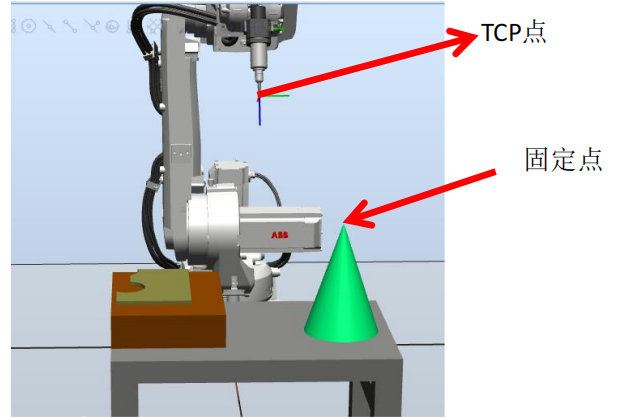
3)手动操作示教器,使工具参考点(TCP)与固定点接触。
用之前介绍的手动操纵工业机器人的方法,去移动工具上的参考点,以四种以上不同的机器人姿态尽可能
与固定点刚好碰上。第四点是用工具的参考点垂直于固定点,第五点是工具参考点从固定点向将要设定为TCP的
X负方向移动,第六点是工具参考点从固定点向将要设定为TCP的Z负方向移动。
手动操作示教器,使工具参考点与固定点接触。
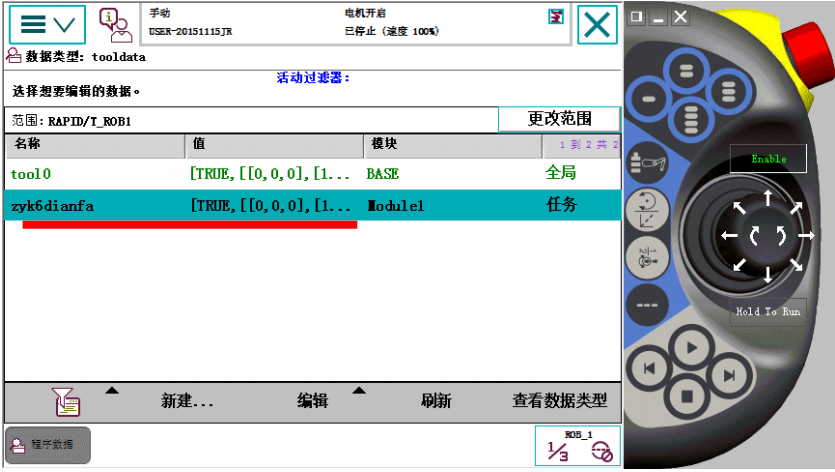
教器界面来查看工具数据Tooldata
4) Tool data数据使用
机器人通过这些位置点的位置数据计算求得TCP的数据, 然后TCP的数据就保存在Tool data这个程序数据中后续可以被程序进行调用。
4 工具坐标准确度检验
用重定位的方法:用示教器控制机器人,进行重定位运动,观察工具中心点TCP位置是否保持不变。如果始
终保持不变,则说明该工具坐标准确性高。
二、设定工具数据Tooldata软件仿真
用示教器控制虚拟机器人,对尖端类工具设置建立工具坐标
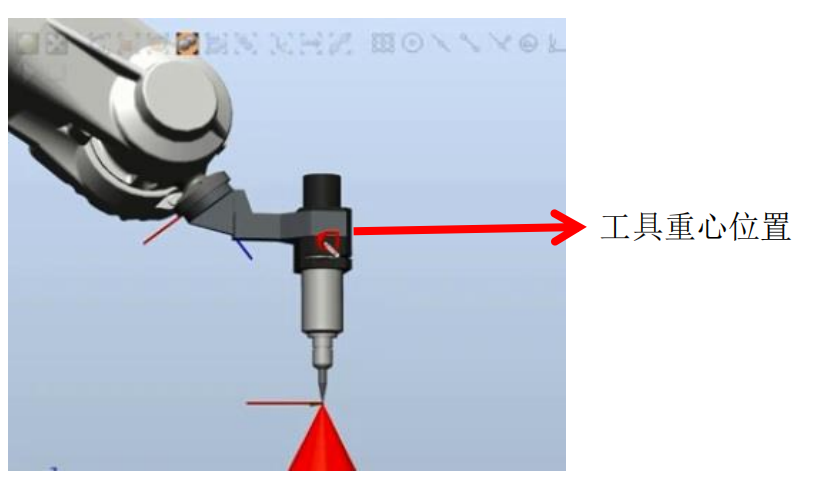
工具重量2公斤,重心位置如图所示相对法兰中偏移(-5,0,10)。
1)新建立工具坐标文件
2)修改工具重量数据
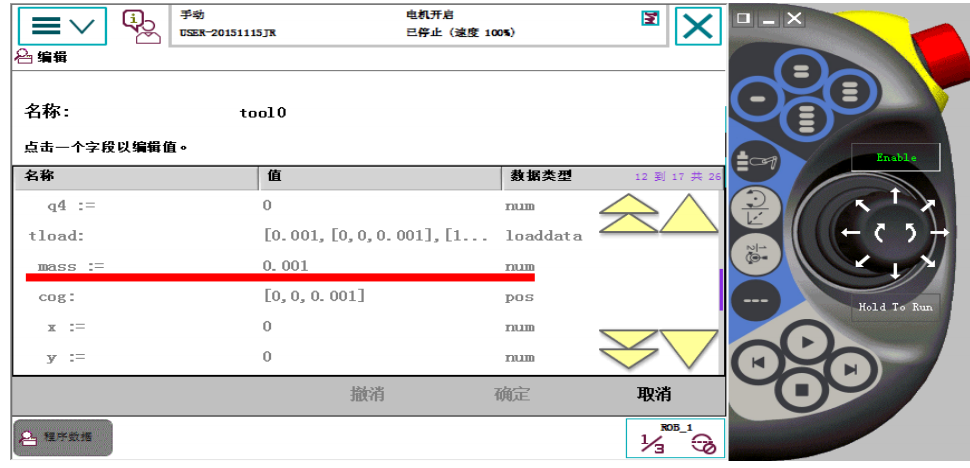
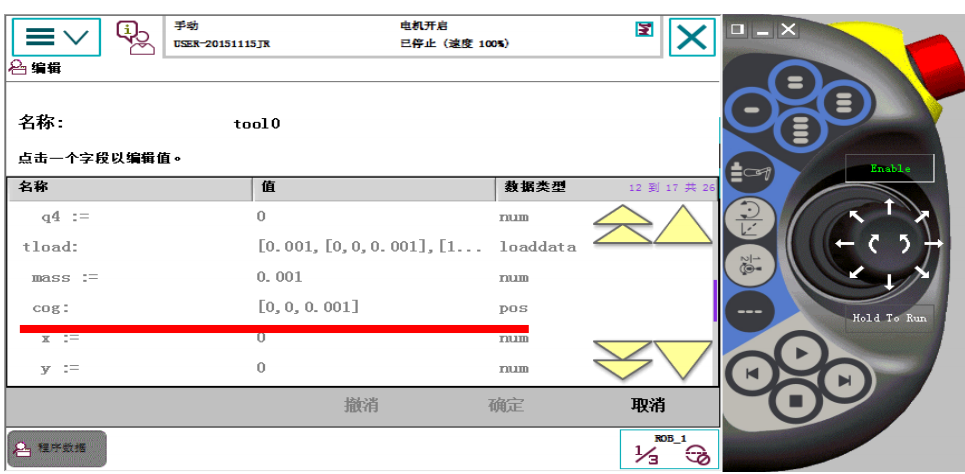
3)修改重心坐标数据
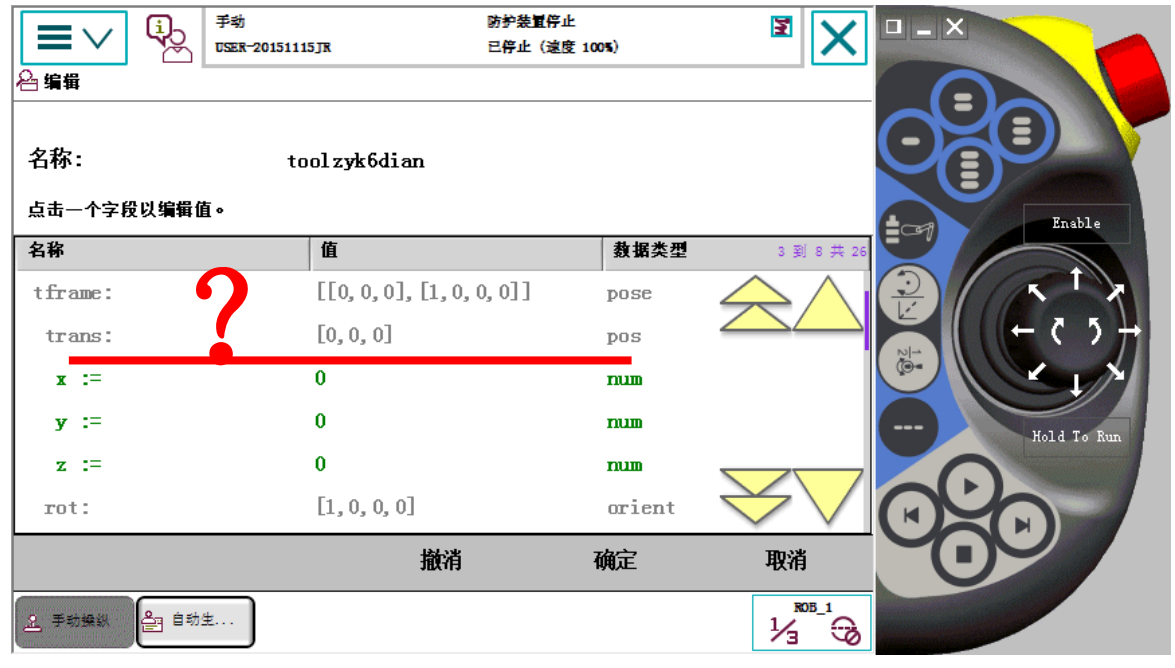
4)确定 TCP坐标位置
5)新建坐标系的准确度

6)新建坐标系数据的储存位置

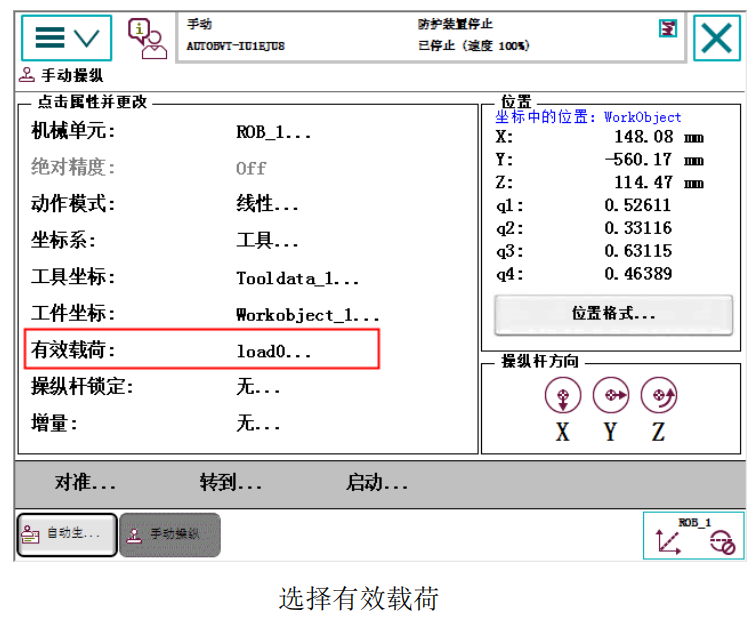
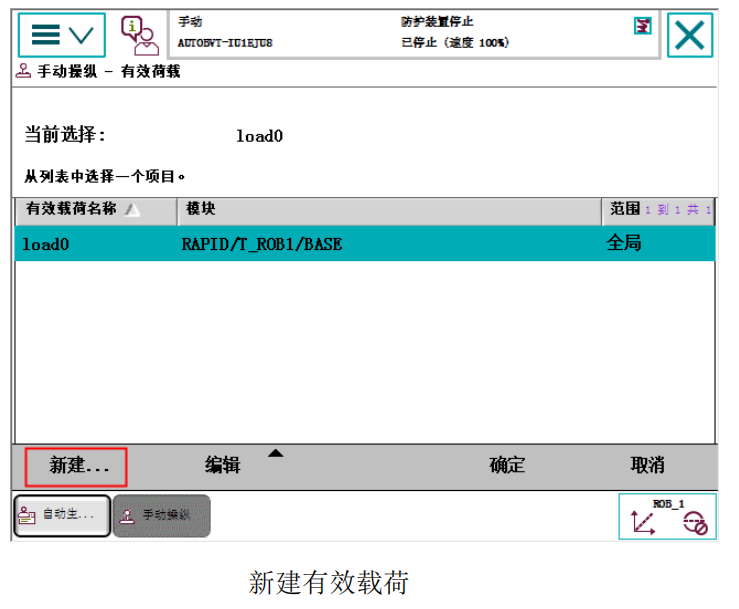
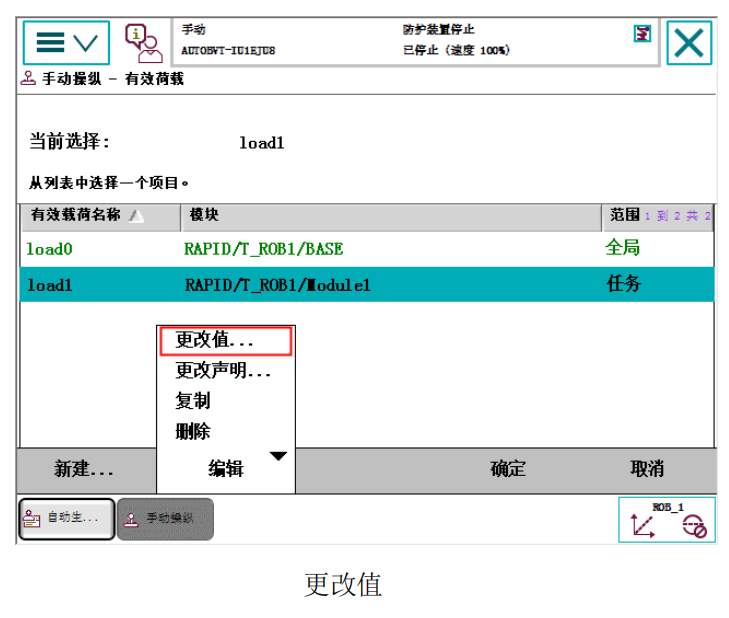
三、设定有效载荷
对于搬运工作的工业机器人,必须正确设定:
夹具的质量
重心tooldata
搬运对象的质量
搬运对象的重心数据
这些统称为loaddata。



来源: 部分来自网络
