
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 一、 设备安装组装
ABB机器人拆包:检查外包装完整性
清点标准装箱物品: 机器人本体、示教器、线缆 配件及控制柜
清点文档说明资料:SMB电池安全说明、出厂清单、基本操作说明书和装箱单
1)ABB机器人机械安装

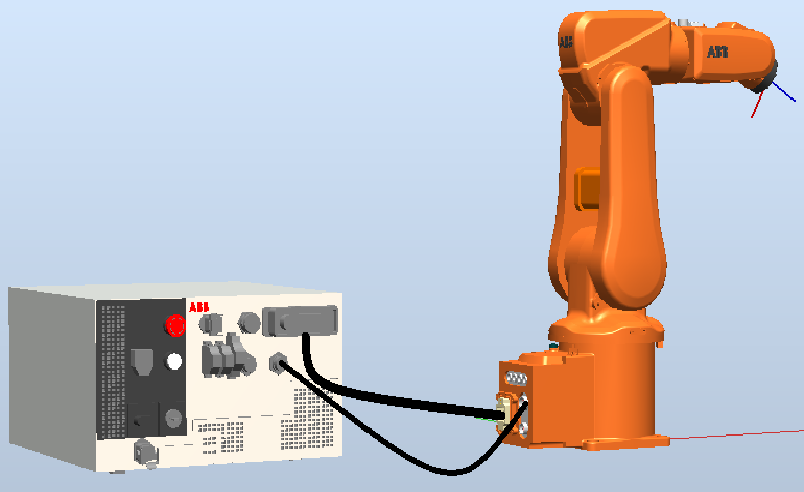
2)ABB机器人电气连接
.ABB机器人本体与控制柜之 间需要连接三条电缆:
A:动力电缆 B:SMB电缆 C:示教器电缆
电缆子类别 | 描述 | 连接点,机柜 | 连接点,机器人 |
机器人电缆,电源 | 将驱动电力从控制机柜中的驱动装置传送到机器人电机 | XS1 | R1.MP |
机器人电缆,信号 | 将编码器数据从电源传输到编码器接口板。 | XS2 | R1.SMB |
电缆集成在机器人中,而连接器位于上臂壳和底座上。
将动力电缆标注为XP1 的插头接入控制柜

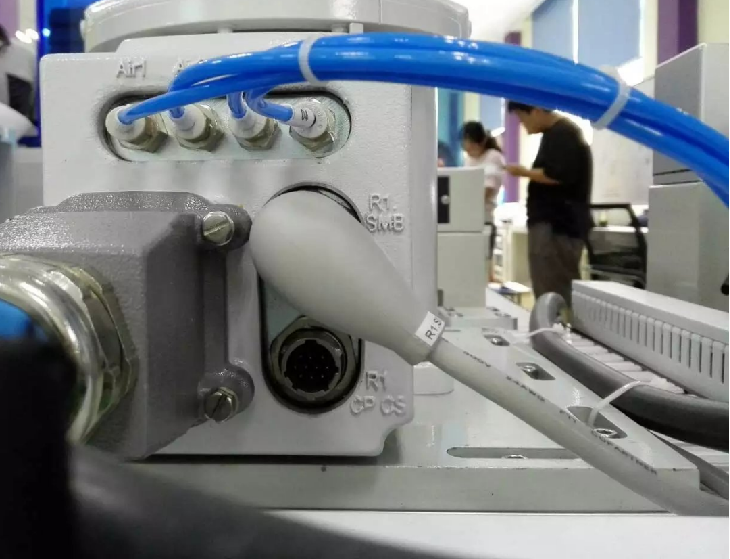
动力电缆标为R1.MP 的插头接入机器人本体底座 的插头上

将SMB电缆(直头)接 头插入到控制柜XS2端口

将SMB电缆(弯头)接 头插入到机器人本体底座 SMB端口
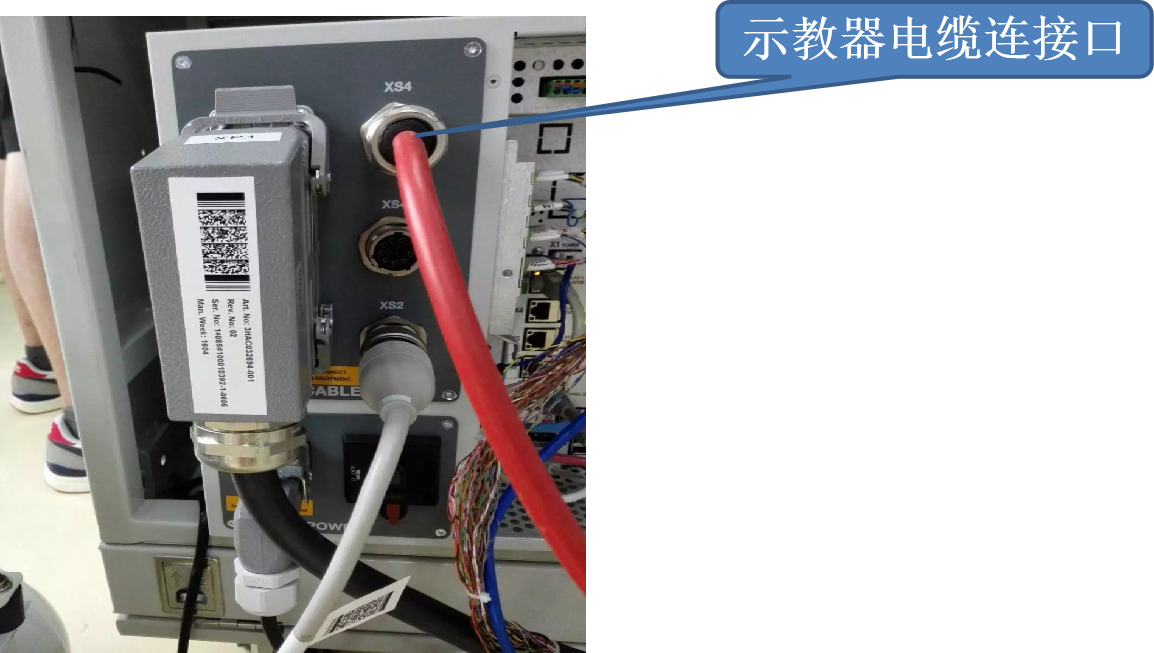
将示教器电缆(红色) 的接头插入到控制柜XS4端 口
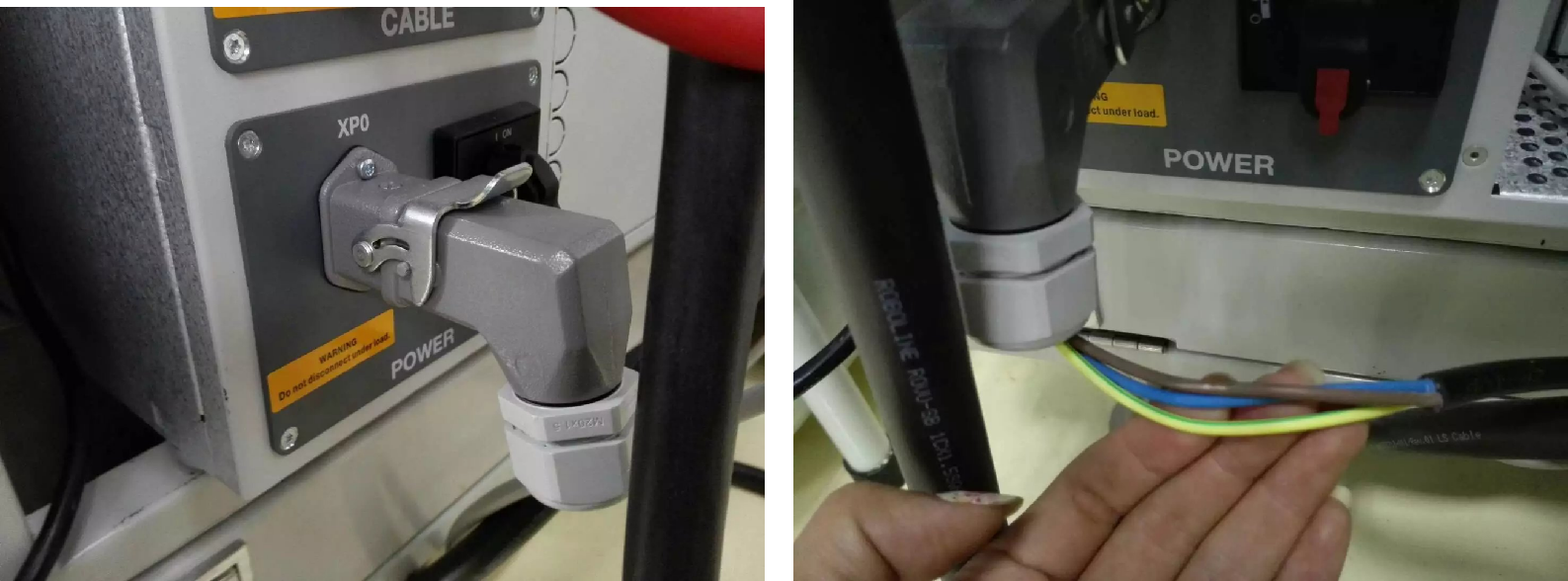
制作控制柜端 的接头,并将电源接头 插入控制柜XP0端口并锁紧
二、信号调试
1)配置I/O
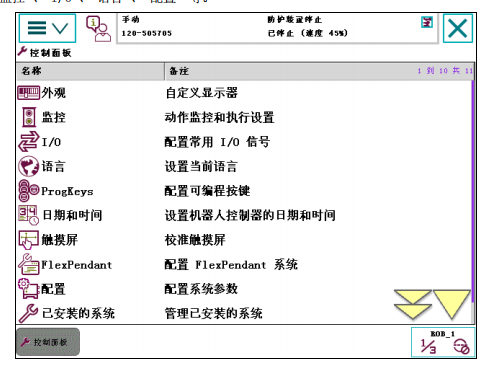
在主菜单中选择“控制面板”,图为控制面板的所有子菜单,包括“外观”、“监控”、“I/O”、“语言”、“配置”等。
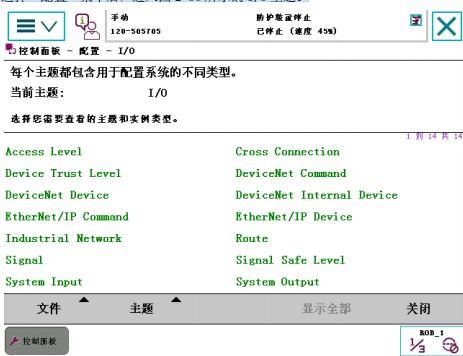
选择“配置”菜单后,进入图所示的 I/O 主题。
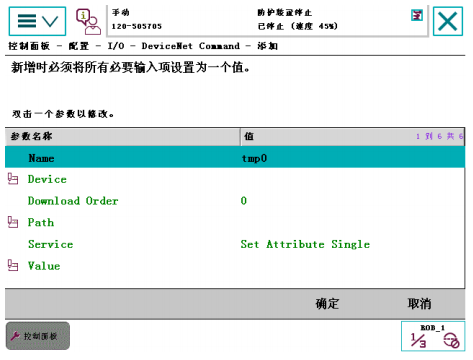
因为 ABB 的 I/O 板都是挂接在 Device Net 现场总线下的设备,因此这里选择“DeviceNet Command”菜单,并按照下图的参数进行填写,包括 Name(名称)等。填写相关信息后,点击“确定”后重启系统。
2).定义数字输入/输出信号
I/O 主题中,选择 Signal 选项,然后点击添加,进行数字输入/输出信号定义。
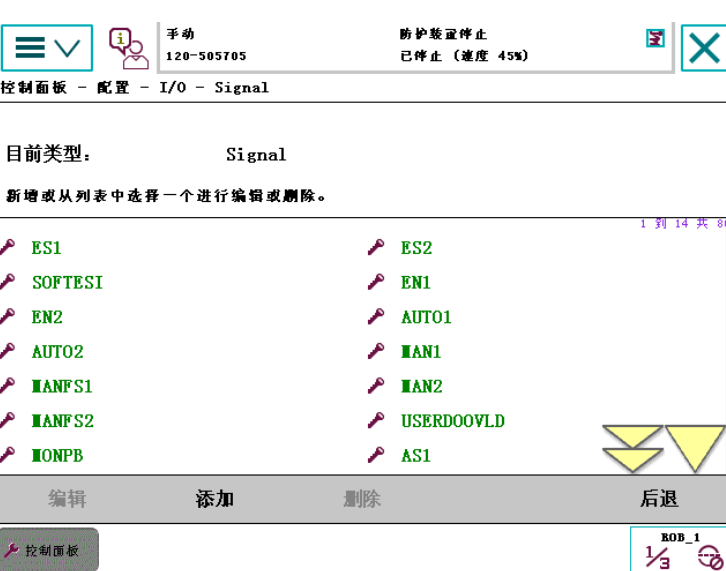
新增 Signal 信号
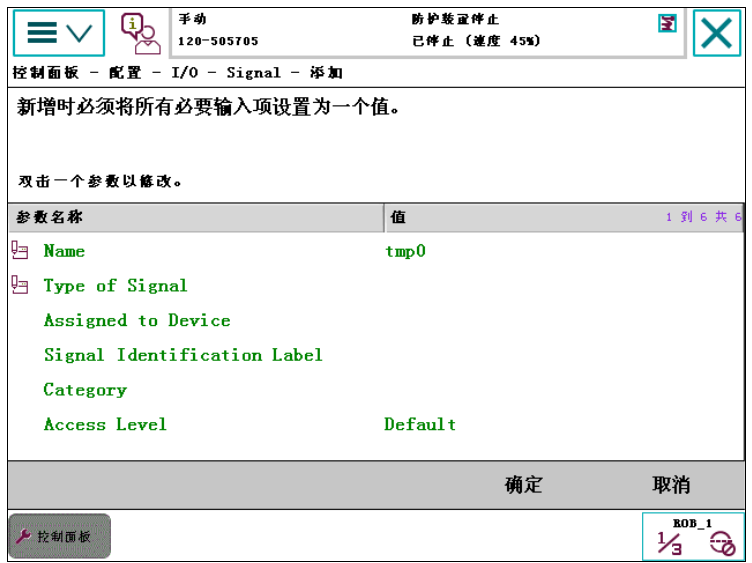
数字输入/输出信号定义
2 输入输出信号测试
就可以在下图所示的输入输出视图种进行输入输出信号测试,包括监控、仿真和强制的操作。
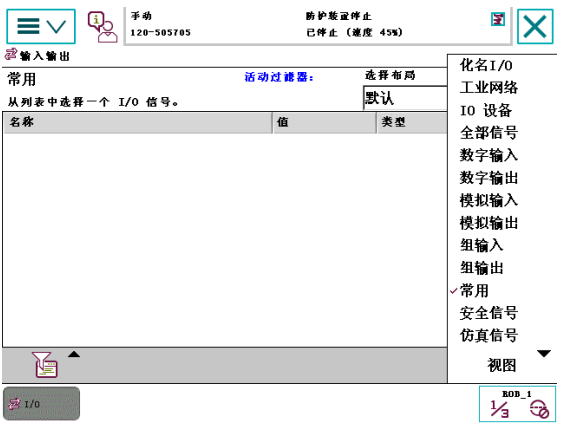
在视图中选择“数字输入”后的所有 DI 信号如下:

对 DI、DO 信号进行仿真,可以确保在没有实际信号输入时通过输入仿真来确保程序单步调试,也可以确保在没有执行输出指令时,直接对输出信号置位和复位。


来源: 部分来自网络
