
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 ABB机器人的组成和基本操作
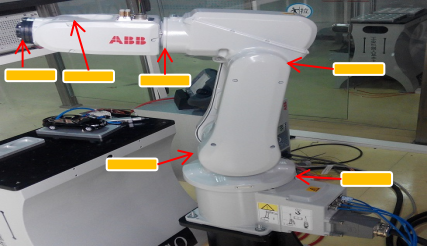
(一)设备组成
1.机器人 2.控制器
3.示教器 4.工作台
5.空气泵 6.操作台
7.配件箱 8.工具挂板
1.机器人

ABB-IRB120,有效负载3kg,臂展0.58米,配套工业立式IRC5控制器,示教器具有中文操作界面;底座是20mm厚钢板地脚固定。
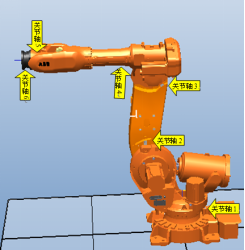
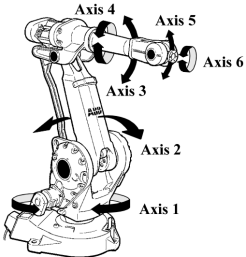
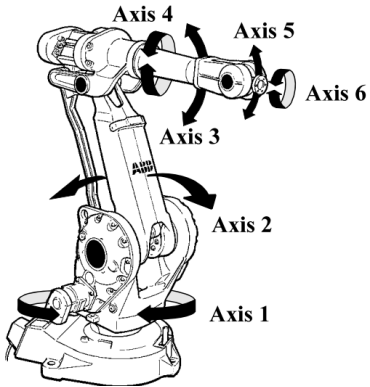
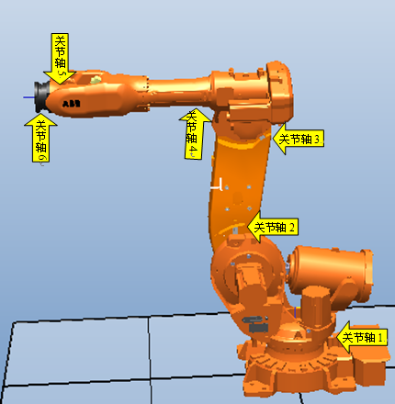
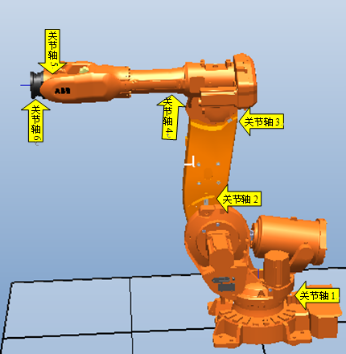
机器人本体(6轴)
l 六个关节轴
l 六台伺服电动机
l 六个转数计数器(编码器)
ABB-IRB120机器人6个关节轴
六个关节轴的示意图
2.控制器

控制器操作面板
电源开关
l 钥匙开关:
l (选择工作模式
l 手动、手动 全速、
l 自动)
l 急停按钮
l 复位按钮
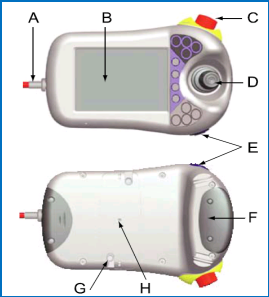
3.示教器
示教器是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置,也是我们最常打交道的控制装置。
A-连接电缆
B-触摸屏
C-急停开关
D-手动操作摇杆
E-数据备份用USB接口
F-使能器按钮
H-示教器复位按钮
G-触摸屏用笔
示教器操作按键

示教器的使能器

使能器按钮分了两档,在手动状态下第一档按下去,机器人将处于电机开启状态。
第二档按下去以后,机器人又处于防护装置停止状态。
示教器摇杆的操作技巧

操纵杆的使用技巧:
我们可以将机器人的操纵杆比作汽车的油门,操纵杆的操纵幅度是与机器人的运动速度相关的。
操纵摇杆幅度较小,则机器人运动速度较慢。
操纵摇杆幅度较大,则机器人运动速度较快。所以我们在初始练习手动操纵操作时,尽量以小幅度操纵摇杆使机器人慢慢运动。
4 工作台
空气泵
工具挂板
安全护栏
l (二)功能任务模块
6大任务——
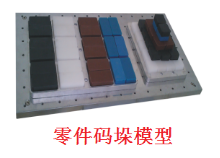
1.轨迹训练任务 2.零件码垛任务
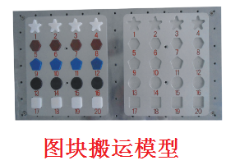
3.图块搬运任务 4.工件装配任务
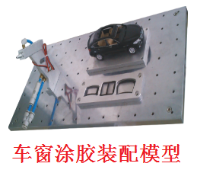
5.检测排列任务 6.车窗涂胶装配任务
二、工业机器人基本操作
(一)机器人开关机操作
(二)机器人系统备份
(三)机器人手动操纵
(四)机器人夹具拆装操作
(五)机器人舞蹈程序演练
(一)开关机操作
开机:在确认输入电压正常后,打开控制柜操作面板的电源开关。
关机:在示教器 “重新启动”菜单中选择“高级”;在高级子菜单选择“关机”,等待至蓝色进度条出现;然后关闭控制柜操作面板的电源开关。
注意:关机后再次开启电源需要等待2分钟。
机器人的重新启动操作
在以下情况下需要重新启动机器人系统:
1)安装了新的硬件。
2)更改了机器人系统配置参数。
3)出现系统故障(SYSFAIL)。
4)RAPID程序出现程序故障。
RAPID程序出现程序故障。
重启动类型 | 说明 |
热启动 | 使用当前的设置重新启动当前系统。 |
B-启动 | 重启并尝试回到上一次的无错状态。一般地,当出现系统故障时使用。 |
P-启动 | 重启并将用户加载的RAPID程序全部删除。 |
I-启动 | 重启并将机器人系统恢复到出厂状态。 |
机器人安全事项
1)常见安全标识 |  |  |  |  |  |  |
危险 | 禁止 | 强制 | 警告 | 电击 | 小心 | 注意 |
机器人安全事项
工业机器人电动机和编码器上的安全标志;关节轴张力控制按钮安全标志。
机器人安全事项



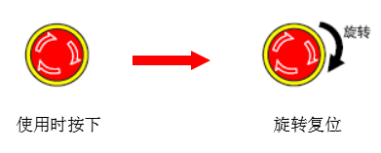
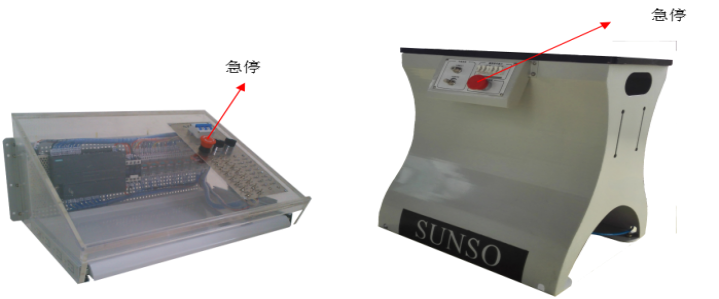
2)急停按钮的使用
急停按钮外观红色,自锁旋放式结构。一般安装在设备控制柜、示教器、操作台等显眼位置,且在紧急或突发事故时易操作。

机器人安全事项
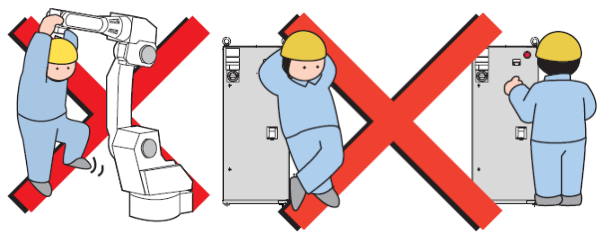
3)操作安全事项
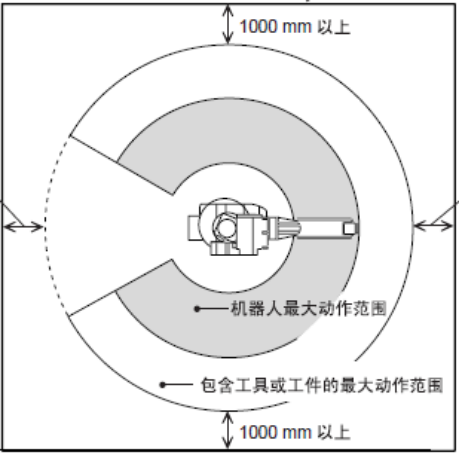
① 严禁强制性扳动机器人运动轴; ②严禁依靠机器人或控制柜; ③ 禁止随意按动操作键等;④机器人行程范围内无人员及碰撞物, 确保作业区内安全。

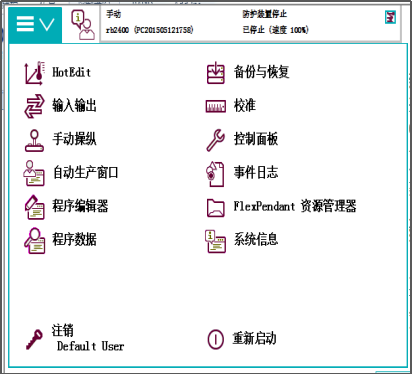
(二)备份系统——
下拉菜单→备份与恢复
(三)机器人手动操纵

1.关节运动
2.线性运动
3.重定位运动
4.转数计数器更新操作
(三)机器人手动操纵
1.关节运动
【ABB→手动操纵→动作模式→轴1-3(4-6)→确定】
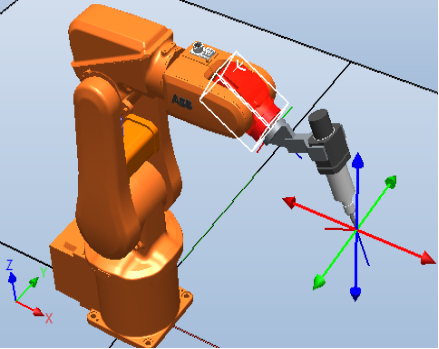
2.线性运动—是指安装在机器人第六轴法兰盘上的工具在空间中作线性运动。
【ABB→手动操纵→动作模式→线性→确定】
(1)使用操纵杆控制机器人运动。通过位移幅度来控制机器人运动的速度。
(2)使用“增量”模式控制机器人运动。在增量模式下,操纵杆每位移一次,机器人就移动一步。如果操纵杆持续一秒或数秒钟,机器人就会持续移动(速率为每秒10步)。

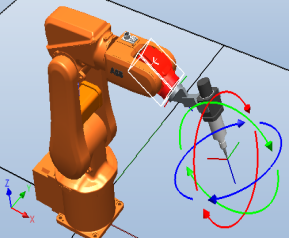
3.重定位运动
【ABB→手动操纵→动作模式→重定位→确定】
机器人的重定位运动:是指机器人第六轴法兰盘上的工具TCP点在空间中绕着工具坐标系旋转的运动,也可理解为机器人绕着工具TCP点作姿态调整的运动。
重定位运动的控制模式:有操纵杆控制和增量模式控制2种,同线性运动方式。
4.转数计数器更新操作
l 以下情况需要对机械原点的位置进行转数计数器更新操作:
l 更换伺服电机转数计数器电池后。
l 当转数计数器发生故障,修复后。
l 转数计数器与测量板之间断开过以后。
l 断电后,机器人关节轴发生了移动。
l 当系统报警提示“10036 转数计数器未更新”时。更新转数计数器。
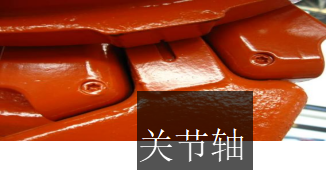
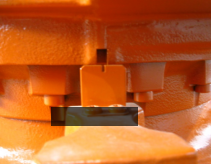
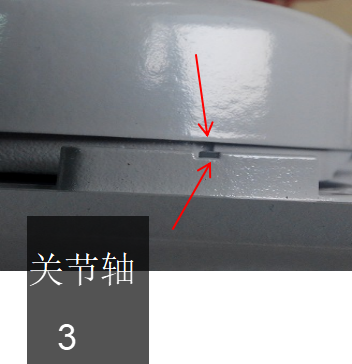
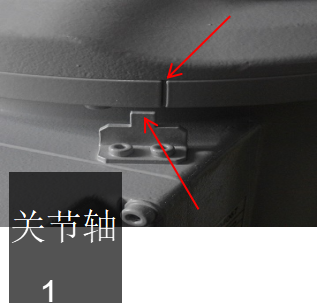
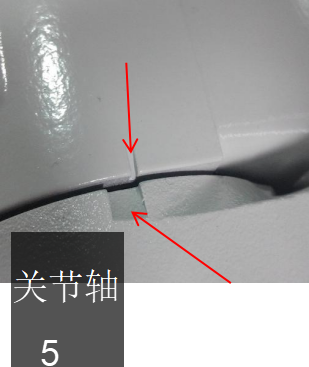
各种型号机器人机械原点刻度位置有所不同,
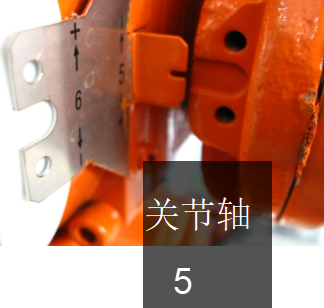



ABB—IRB6640机器人机械原点刻度位置



4.转数计数器更新操作
电机偏移数据

操作步骤:
(1)手动操作每个关节轴到标定的机械原点;
(2)编辑电机校准偏移数据;
(3)进行校准操作,更新转数计数器。
ABB-IRB120机器人机械原点刻度位置
l
4.转数计数器更新操作
位置偏移:如果机器人由于安装位置的关系,六个轴无法同时到达机械原点刻度位置,则可以逐一对关节轴进行转数计数器更新。
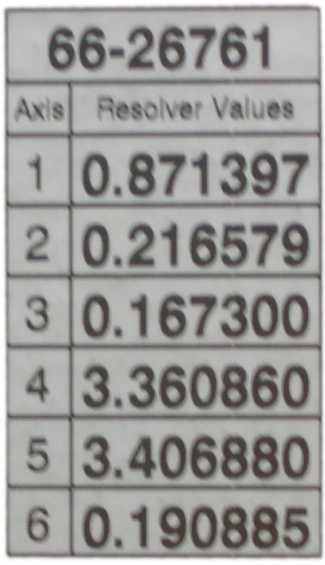
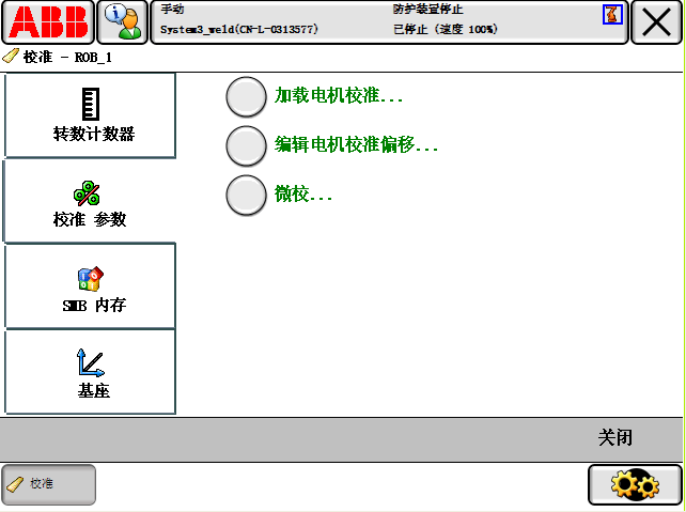
输入校准偏移数据步骤
1. 点击”校准参数”
2.点击“编辑电机校准偏移”
3.根据机器人的校准参数进行输入
打开校准画面,进行校准操作
打开校准画面,进行校准操作
(四)夹具安装
绘图笔夹具的安装:
完成轨迹训练任务采用绘图
笔夹具,此夹具在与机器人
J6轴连接法兰有四个螺丝安
装孔,把夹具调整到合适位
置,再用螺丝将其紧固到机
器人J6轴上。
双吸盘夹具安装:完成图块搬运任务采用双吸盘夹具,首先把双吸盘夹具调整到合适位置(利于机器人运转中吸取),并把夹具安装孔与机器人J6轴安装孔位对正;然后,用四个螺丝把夹具锁紧
到J6轴上;再把
气管与夹具吸盘
上真空发生器的
输入端连接。
(五)程序演练
输入控制程序,实现机器人的简单舞蹈运动控制。
来源: 部分来自网络
