
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 第一部分:ABB机器人型号及基本组成
一、ABB机器人型号与含义
左边第一位数:指机器人的大小;左边第二位数:指的是所属系统。
IRB 120仅重25kg, 最大承载为3kg,常用于搬运、雕刻、喷涂等;
IRB 1400承载较小,最大承载为5kg,常用于焊接;
IRB 2400承载较小,最大承载为 7kg ,常用于焊接;
IRB 4400承载较大,最大承载为60kg 常用于搬运或大范围焊接;
IRB 6400承载较大,最大承载为200kg,常用于搬运或大范围焊接。
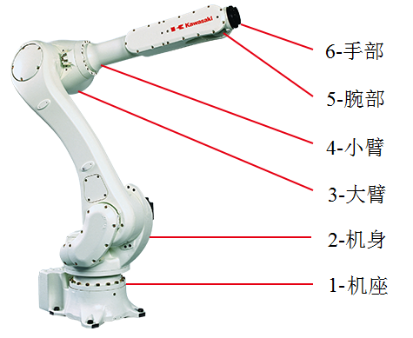
二、ABB机器人基本组成
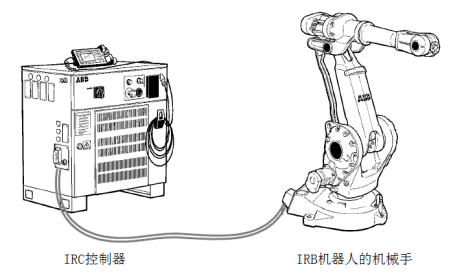
ABB 机器人是由两部分组成:机械手和控制器,且无论是何种型号,机器人控制部分基本相同。
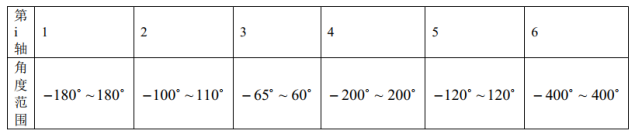
机械手是由六个转轴组成的空间 6 杆开链机构,理论上可以达到运动范围内的任何一点,下表中列举了各轴的转动范围,每个转轴均带有一个齿轮箱,机械手运动精度可达到±0.05mm~±0.2mm。
控制器包括主计算机板、机器人计算机板、快速硬盘、网络通信计算机、示教器、驱动单元、通信单元等组成。

第二部分:工业机器人的核心参数
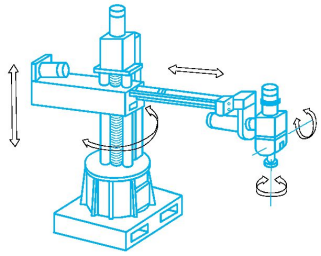
5自由度机器人
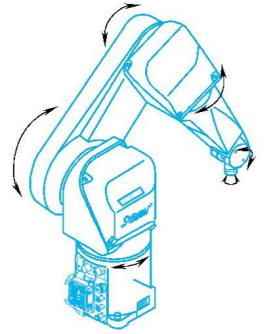
6自由度机器人
定位精度
是指机器人手部实际到达位置与目标位置之间的差异,用反复多次测试的定位结果的代表点与指定位置之间的距离来表示。
重复定位精度
是指机器人重复定位手部于同一目标位置的能力,以实际位置值的分散程度来表示。实际应用中,常以重复测试结果的标准偏差值的3倍来表示,它用于衡量一系列误差值的密集度。
工作范围
是指机器人手臂末端或手腕中心所能达到的所有点的集合。为了真实地反映机器人的特征参数,一般工作范围是指不安装末端操作器的工作区域。
工作范围的形状和大小是十分重要的,机器人在执行某作业时可能会因为存在手部不能到达的作业死区而不能完成任务。
最大工作速度
指工业机器人自由度上最大的稳定速度,也指手臂末端的最大合成速度。工作速度越快,工作效率就越高。但是,工作速度越快就要花费更多的时间去升速和降速。
承载能力
承载能力不仅决定于负载的重量,而且与机器人运行的速度、加速度的大小和方向有关。 为了安全起见,承载能力这一技术指标是指高速运行时的承载能力。承载能力不仅指负载,而且包括了机器人末端操作器的质量。
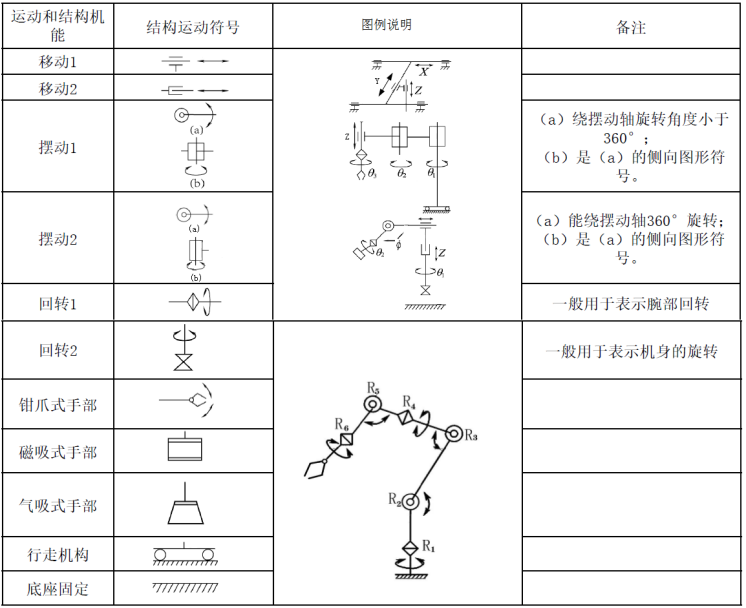
第三部分:工业机器人关节机构
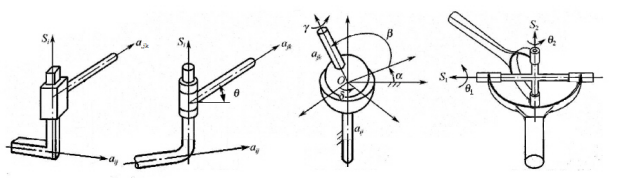
a)移动关节(P) b)转动关节(R) c)球面关节(S) d)虎克铰关节(T)
四种关节类型
六关节机器人
工业机器人结构运动简图
第四部分 :工业机器人分类
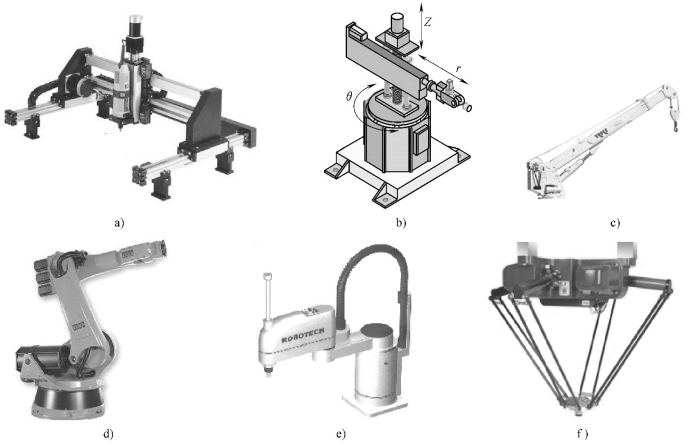
a)直角坐标型 b)圆柱坐标型 c)球坐标型 d)多关节型 e)平面关节型 f)并联型
工业机器人类型
1)直角坐标型机器人的性能
特点:在直线方向上移动,运动容易想象;通过计算机控制实现,容易达到高精度;占地面积大,运动速度低;直线驱动部分难以密封、防尘,容易被污染。
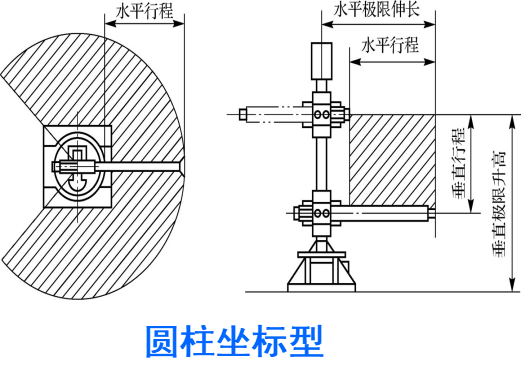
2)圆柱坐标型机器人的性能
特点:运动容易想象和计算,直线部分可采用液压驱动,可输出较大的动力;能够伸入型腔式机器内部,它的手臂可以到达的空间受到限制,不能到达近立柱或近地面的空间;直线驱动部分难以密封、防尘;后臂工作时,手臂后端会碰到工作范围内的其他物体。
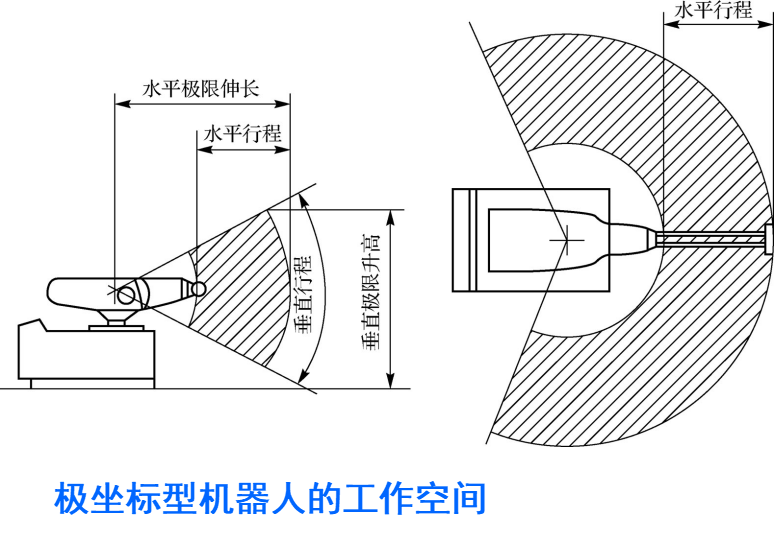
3)极坐标型机器人的性能
特点:中心支架附近的工作范围大,两个转动驱动装置容易密封,覆盖工作空间较大;坐标复杂,难于控制;直线驱动装置仍存在密封及工作死区的问题。
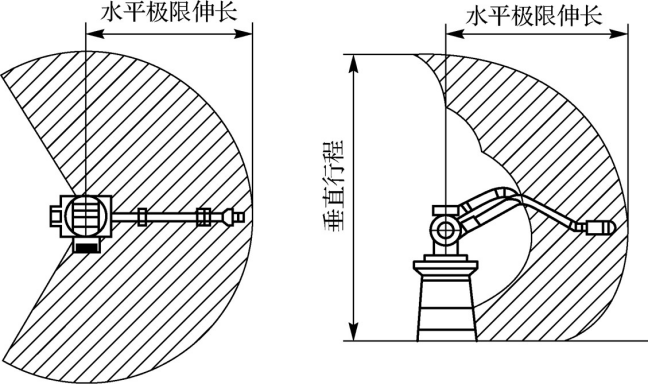
4)多关节坐标型机器人的性能
特点:关节全都是旋转的,类似于人的手臂,是工业机器人中最常见的结构;它的工作范围较为复杂。
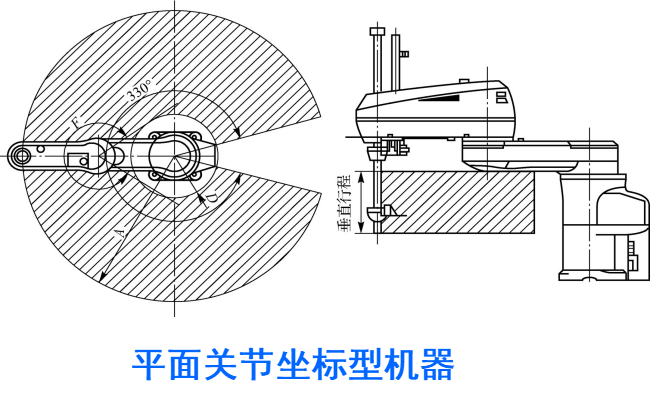
5)平面关节坐标型机器人的性能
特点:前两个关节(肩关节和肘关节)都是平面旋转的,最后一个关节(腕关节)是工业机器人中最常见的结构;它的工作范围较为复杂
按控制方式划分
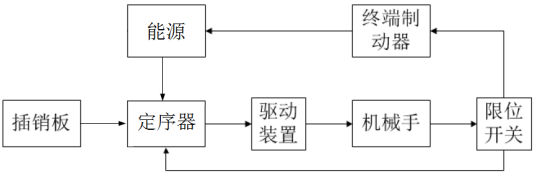
1)非伺服控制机器人
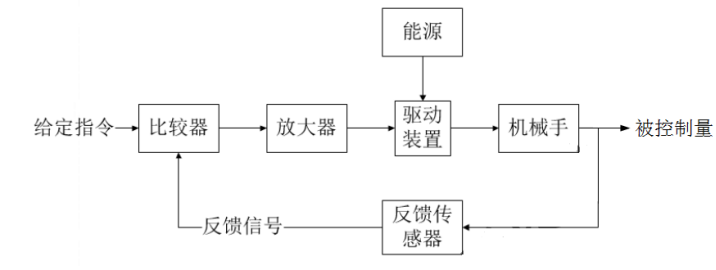
2)按控制方式划分
3)按驱动方式划分
①液压驱动
使用液体油液来驱动执行机构的。负载能力大,结构紧凑,传动平稳,但不宜在高温或低温场合作业。
②气压驱动
以压缩空气来驱动执行机构的。空气来源方便,动作迅速,结构简单。常用于负载较小的场合。
③电力驱动
利用电动机产生的力矩驱动执行结构的。电力驱动易于控制,运动精度高,成本低。
④新型驱动
如静电驱动器、压电驱动器、形状记忆合金驱动器、人工肌肉及光驱动器等。
第五部分 工业机器人末端执行器
末端执行器的定义
①机器人的末端执行器是一个安装在移动设备或者机器人手臂上,使其能够拿起一个对象,并且具有处理、传输、夹持、放置和释放对象到一个准确的离散位置等功能的机构。
②末端执行器也叫机器人的手部,它是安装在工业机器人手腕上直接抓握工件或执行作业的部件。包括从气动手爪之类的工业装置到弧焊和应用的特殊工具。
末端执行器特点:
①手部与手腕相连处可拆卸。
手部与手腕有机械接口,也可能有电、气、液接头,当工业机器人作业对象不同时,可以方便地拆卸和更换手部 。
②手部的通用性比较差。
工业机器人手部通常是专用的装置,比如:一种手爪往往只能抓握一种或几种在形状、尺寸、重量等方面相近似的工件;一种工具只能执行一种作业任务。
③手部是一个独立的部件。
假如把手腕归属于手臂,那么工业机器人机械系统的三大件就是机身、手臂和手部(末端执行器 )。
由于机器人的用途不同,因此要求末端执行器的结构和性能也不相同 。
按其功能,末端执行器可分成两大类即手爪类和工具类。
按其智能化程度分,可以分为普通式及智能化末端执行机构。
手爪类末端执行器
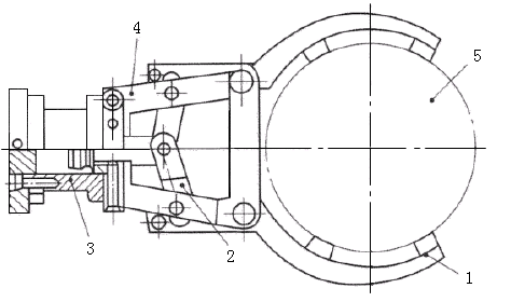
1:手指;2:传动机构;3:驱动装置;4:支架;5:工件
夹持类手爪
来源: 部分来自网络
