
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 一、示教的主要作用
工业机器人示教就是编程者采用各种示教方法事先“告知”机器人所要进行的动作信息和作业信息等。这些信息大致分为三类:机器人位置和姿态信息,轨迹和路径点等的信息;机器人任务动作顺序信等信息;机器人动作、作业时的附加条件等的信息,机器人动作的速度和加速度等信息和作业内容信息等。
1)示教编程
即操作人员通过示教器,手动控制机器人的关节运动,以使机器人运动到预定的位置,同时将该位置进行记录,并传递到机器人控制器中,之后的机器人可根据指令自动重复该任务,操作人员也可以选择不同的坐标系对机器人进行示教。
主要集中在搬运、码垛、焊接等领域,特点是轨迹简单,手工示教时,记录的点不太多。
缺点:
- 示教在线编程过程繁琐、效率低。
- 精度完全是靠示教者的目测决定,而且对于复杂的路径示教在线编程难以取得令人满意的效果。
- 示教器种类太多,学习量太大。
- 示教过程容易发生事故,轻则撞坏设备,重则撞伤人。
- 对实际的机器人进行示教时要占用机器人。
2)离线编程
是通过软件,在电脑里重建整个工作场景的三维虚拟环境,然后软件可以根据要工加零件的大小、形状、材料,同时配合软件操作者的一些操作,自动生成机器人的运动轨迹,即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人程序传输给机器人。
广泛应用于打磨、去毛刺、焊接、激光切割、数控加工等机器人新兴应用领域。
优点:
- 能够根据虚拟场景中的零件形状,自动生成复杂加工轨迹。
- 可以控制大部分主流机器人。
- 可以进行轨迹仿真、路径优化、后置代码的生成。这是区别于示教编程的一个显著的优点。
- 可以进行碰撞检测。
- 生产线不停止的编程。
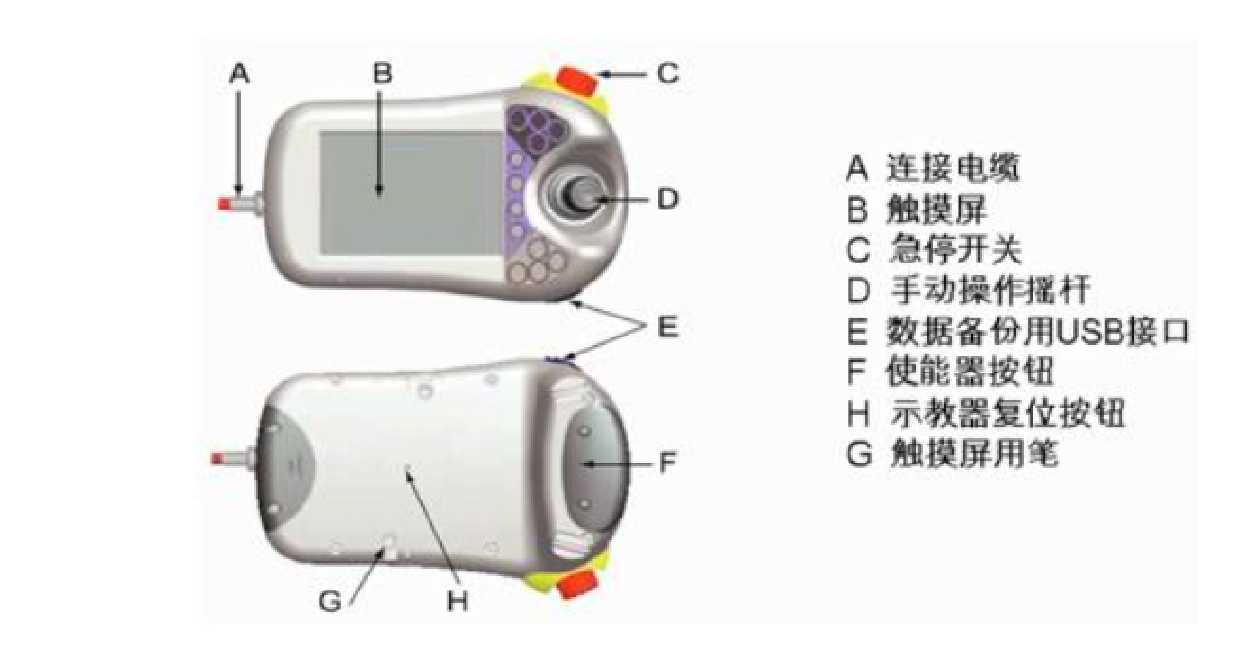
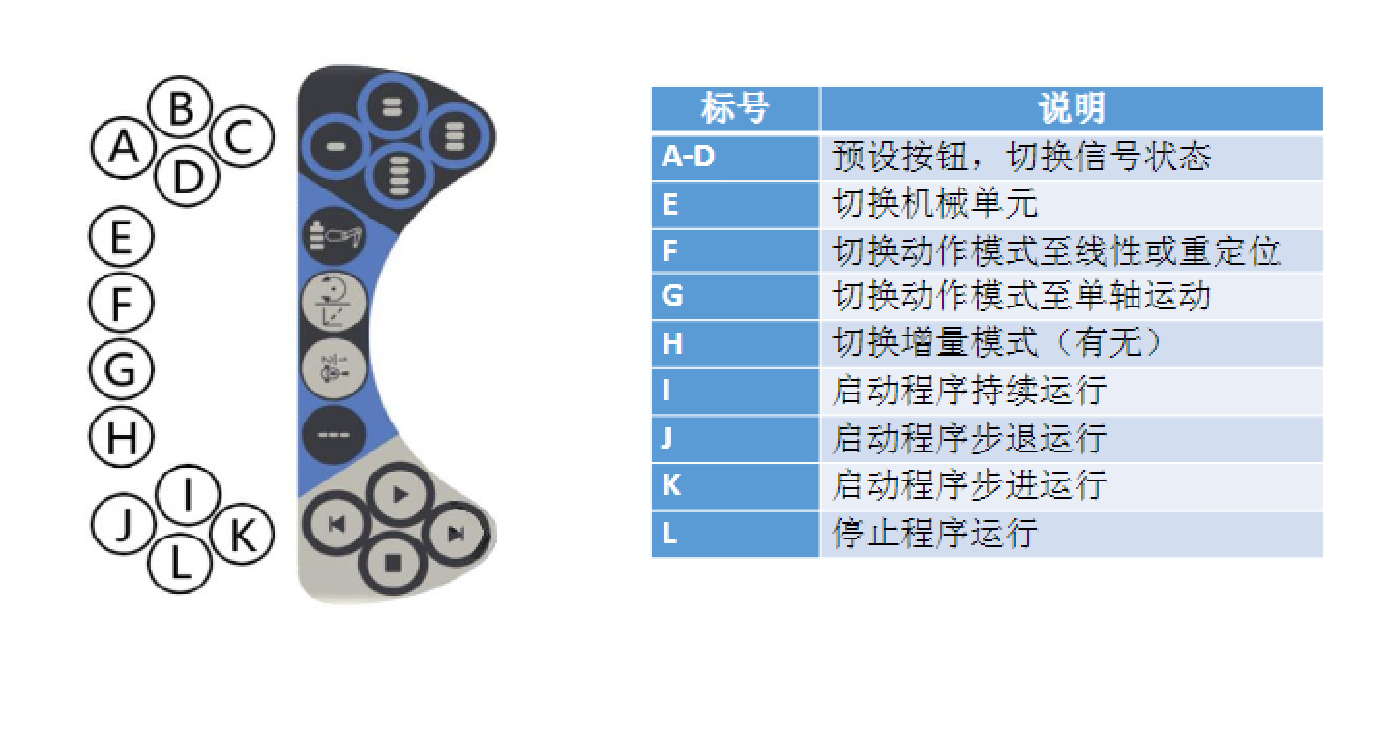
示教器的外形
二、示教编程实例
要求机器人产生某些动作和完成某些作业,必须赋予机器人种种信息,这种赋予信息的方法就是示教法。这些信息大致分为三类。
位置和姿态信息示教;
机器人动作顺序信息示教;
动作状况和作业时附加条件等信息的示教;
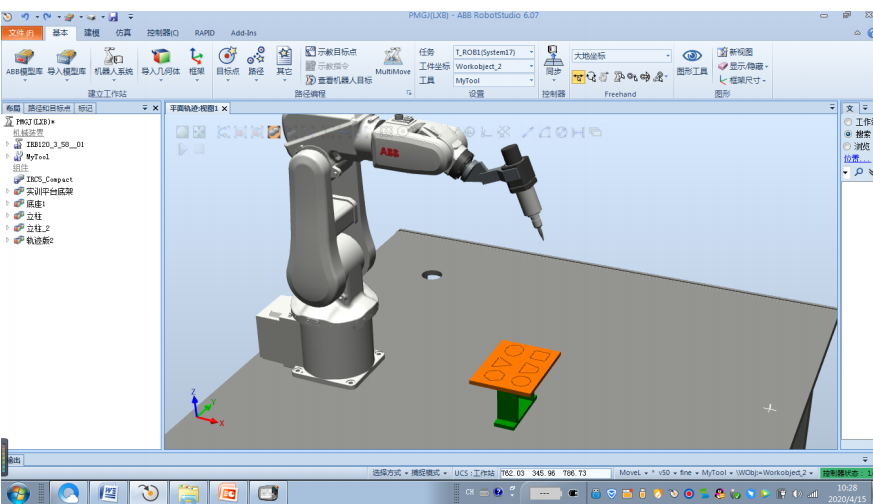
完成任务为:

任务基本逻辑
A.利用 MoveJ指令将机器人运动到pHome 点---关节运动到原点;
B.利用 MoveJ指令将机器人运动到p10点------关节运动到矩形第1个顶点;
C.利用MoveL指令将机器人运动到p20点-----线性运动绘制第1条边;
D.利用MoveL指令将机器人运动到p30点----线性运动绘制第2条边;
E.利用 MoveL指令将机器人运动到p40点-----线性运动绘制第3条边;
F.利用MoveL指令将机器人运动到p10点-----线性运动绘制第4条边;
G.利用MoveJ指令将机器人运动到pHome 点---关节运动回到原点:

6. 示教再现
仿真测试:程序编好后,单击“调试”一“PP移至例行程序”一按下使能器“Enable”一按下“播放”按钮,观察机器人运行效果;
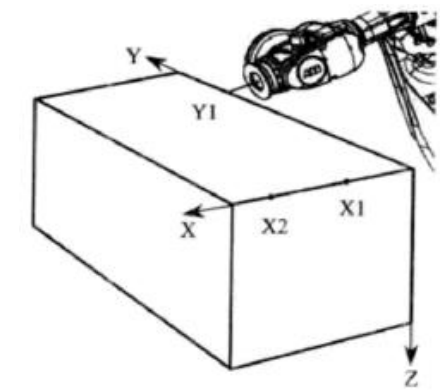
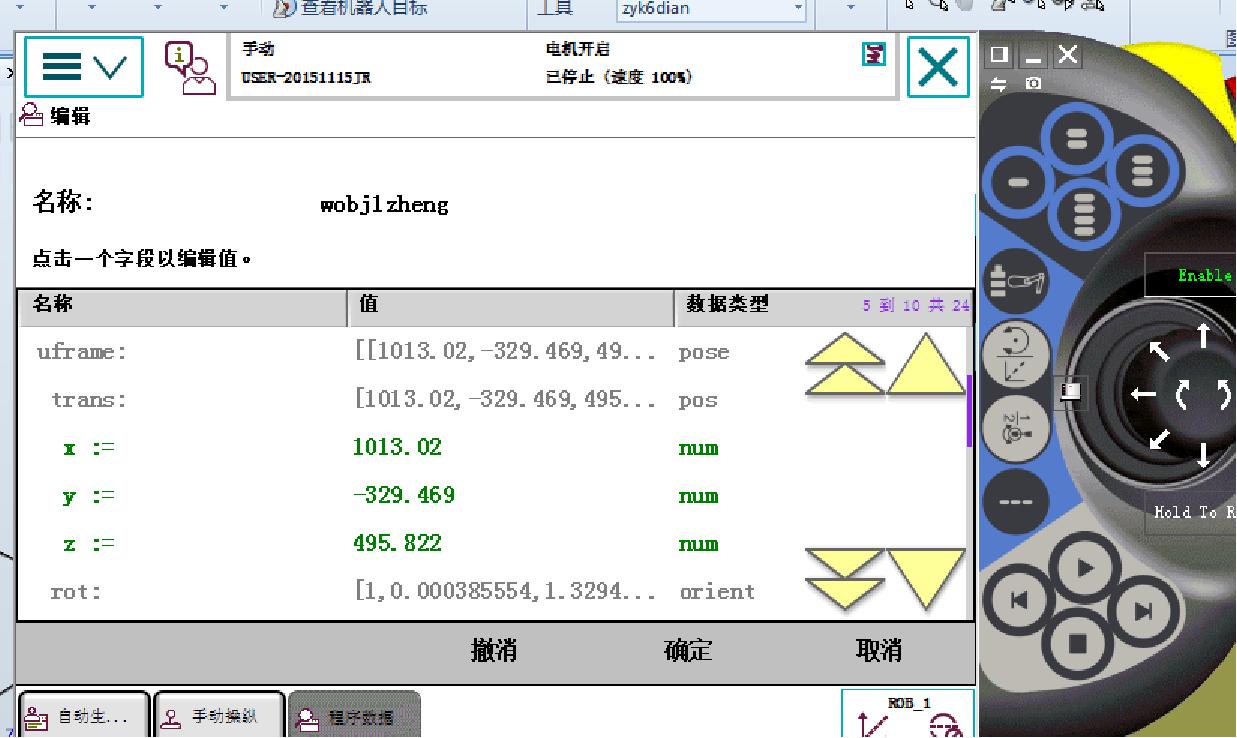
三、设定工件坐标 wobjdata
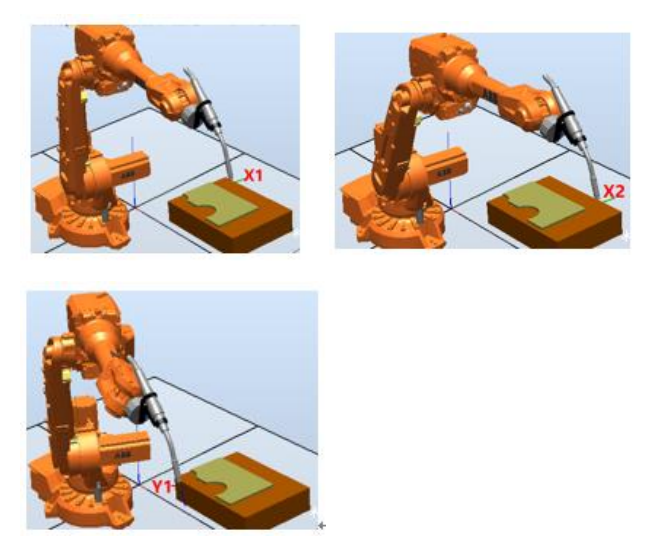
在对象平面上,只需要定义 3 个点,就可以建立一个坐标。其中,X1 点驱动工件的坐标原点,X2 点确定工件 X 坐标的正方向,Y1 点确定工件 Y 坐标的正方向
设定工件坐标是进行示教的前提,所有的示教点都必需在对应的工件坐标中建立。如果在 wobj0 上建立示教点,如果机器人在搬动以后就必须重教所有的点。如果是在对应的工件坐标上示教的话就可以只修改一下工件坐标,而无需重教所有的点。
如图 所示,分 3 次使用快捷方式操纵机器人以单轴运动或线性运动方式靠近 X1、X2、Y1 点并单击“修改位置”,将各个点位置记录下来。
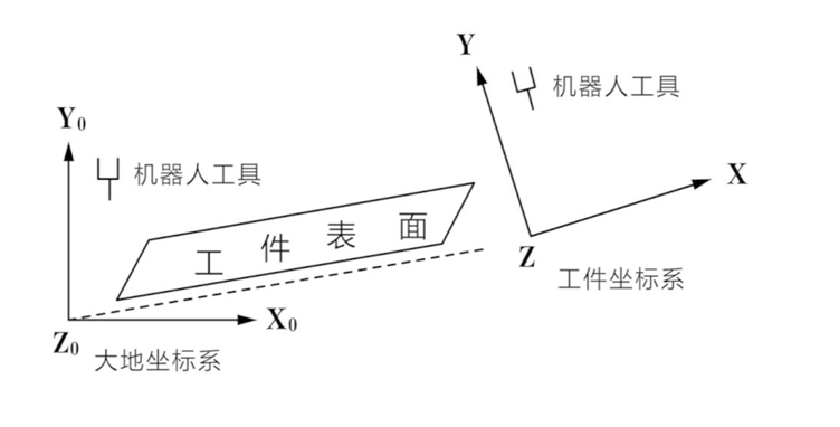
工件坐标系的定义
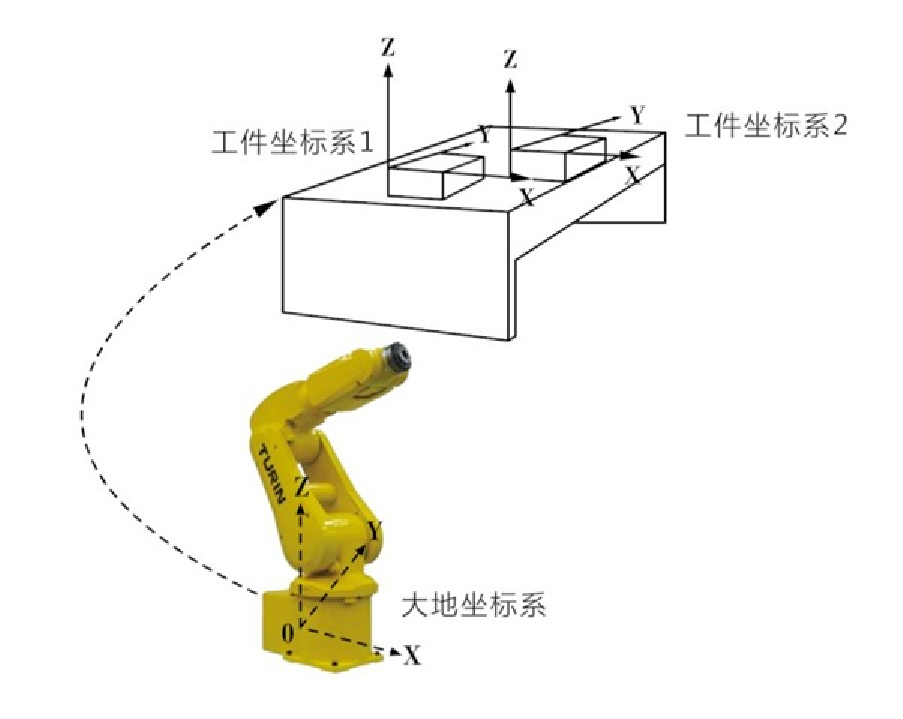
当工件的作业表面与大地坐标系不正交时,通过设定与工件作业面正交的坐标系,可以简化示教编程。
当多个工件在操作台的不同位置进行相同操作时,可以通过变换工件坐标系,省去了重复示教的过程
在工件对象的平面上,只需要确定三个点,就可以建立一个工件坐标系,如下图所示
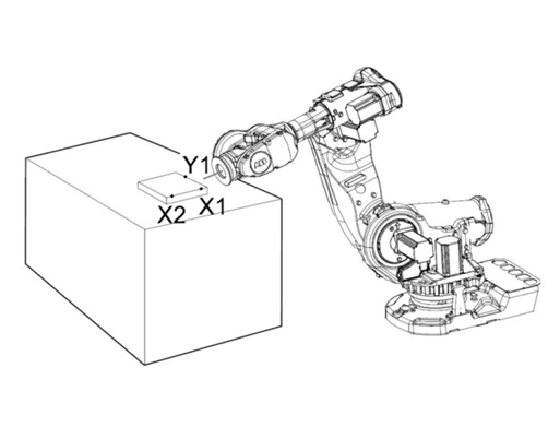
X1 为工件坐标的原点,既零点位置
X2 为工件坐标的+X方向
Y1 为工件坐标的+Y方向
工件坐标符合右手定则
中指指向+X方向
食指指向+Y方向
大拇指的方向则为+Z方向
来源: 部分来自网络
