
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助扇扫是指天线波束方向在平面的一部分上进行扫描。 对驱动系统在整个扇扫过程的动态分析,是雷达天线驱动装置参数确定和强度校核的前提。
定义天线波束方向在平面的一部分上进行扫描。
影响在雷达天线结构系统中,驱动系统是天线座极其重要的组成部分,驱动系统的稳定可靠直接影响整个天线系统的动态性能。雷达天线均在露天工作,作用在它们的动力传动装置上的载荷极其复杂,雷达天线整个工作过程中载荷是不断变化的,它受自然环境风速、风向以及系统转速、加速度等因素的影响。扇形扫描工作过程中,由于驱动系统伺服电机换向瞬间,因为速度的突变,系统将产生很大的冲击,传动齿轮间的冲击力对系统的破化性不容忽视,对驱动系统在整个扇形扫描过程的动态分析,是雷达天线驱动装置参数确定和强度校核的前提,也是传动系统元件选型、设计以及工作特性分析的依据。1
应用扇扫雷达视频采集和显控系统主要功能是实现一个通用的雷达终端系统,完成雷达视频信号采集、数据处理、雷达状态的监控及人机交互、产生控制雷达的命令、雷达数据终端显示等功能。
主要功能要求为:
(1)系统工作在圆周扫描和扇形扫描两种工作模式:
(2)能实时接收并显示雷达视频信号;
(3)在同一屏幕上具备综合显示(P显)、控制菜单、工作状态显示等功能;
(4)支持数据、状态等的记录和重演;
(5)可通过与数据采集板通讯实现对数据采集板工作状态的选择和监控。
扇扫雷达的视频数据采集板接收来自雷达前端的各种信息,进行数字化和信息化后形成信息包,经PCI总线接口传送至计算机内存。终端软件系统对信息包进行解析和处理,实现显示,控制,存储等功能,终端系统产生的扇扫雷达的控制信息送到天线控制系统控制天线的转动。
扇扫雷达视频采集与显控系统的整体框图如图所示,系统主要由计算机系统,数据采集板,光栅显示器三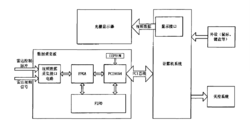 大部分组成。由于雷达视频信号的采样频率高、数据量大,因此实现雷达视频信号数字化后的实时数据处理及显示,是雷达终端系统中一个较难解决的问题。为了提高整个系统的数据吞吐量和响应速度,我们采用了一些改进方法或技术。首先采用PCI总线,并利用Linux2.6版本内核出色的实时性,开发基于DMA方式的驱动程序来保证采集和显示系统的响应速度。其次利用FPGA器件实现扫描转换,以提高系统数据处理速率,同时利用Linux下特有的帧缓冲技术来提高显示速度。2
大部分组成。由于雷达视频信号的采样频率高、数据量大,因此实现雷达视频信号数字化后的实时数据处理及显示,是雷达终端系统中一个较难解决的问题。为了提高整个系统的数据吞吐量和响应速度,我们采用了一些改进方法或技术。首先采用PCI总线,并利用Linux2.6版本内核出色的实时性,开发基于DMA方式的驱动程序来保证采集和显示系统的响应速度。其次利用FPGA器件实现扫描转换,以提高系统数据处理速率,同时利用Linux下特有的帧缓冲技术来提高显示速度。2
本词条内容贡献者为:
胡启洲 - 副教授 - 南京理工大学扇扫
图文简介
扇扫是指天线波束方向在平面的一部分上进行扫描。 对驱动系统在整个扇扫过程的动态分析,是雷达天线驱动装置参数确定和强度校核的前提。
- 来源: 科普中国科学百科
- 上传时间:2018-11-15
