
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助主动台车是指只有驱动装置,用于驱动起重机行走的行走台车。当起重机的起重量较大时,为了降低车轮上的轮压,采用行走台车作为行走支承装置。有双轮和多轮台车之分。
简介主动台车是指只有驱动装置,用于驱动起重机行走的行走台车。当起重机的起重量较大时,为了降低车轮上的轮压,采用行走台车作为行走支承装置。有双轮和多轮台车之分。
运行驱动机构的构造有轨运行有两种驱动方式:自行式和牵引式;自行式的特点是运行驱动机构在运行部分上,靠主动轮与轨道间的附着力驱动,构造简单,布置方便,应用很广。缺点:自重较大,驱动力有限,不能产生较大的加速度,不能用于玻度较大的场合。
牵引式的特点:运行驱动机构装在运行部分之外,自重小,驱动力不受限制。缺点:牵引钢丝绳寿命短,维修麻烦,运行阻力大。所以用要求自重小或坡度大的场合。
自行式主动轮布置方式1.布置原则:保证起重机主动轮在任何情况下都有足够的轮压——足够的附着力(主动轮与轨道的摩擦力)。
2.驱动轮数:通常为1/2的总轮数或1/4总轮数。根据打滑条件确定。
3.布置方式:
(1)单边布置:特点:驱动力不对称,主动轮压随小车运行而变化,用于电葫芦,小起重量,运行速度低的情况。如: 小跨度单梁吊。
(2)对面布置:特点:驱动力对称,主动轮压之和不随小车运行而变化,桥吊应用最多,不能用于旋转式起重机。
(3)对角布置:理论上可保证主动轮压之和不随臂架位置变化,但实际由于轨道不平等原因仍有变化,适用中小型旋转类型起重机上。
(4)四角布置:可保证主动轮压不变,用于大型起重机上。
(5)全部驱动:启动快,速度大,用于装卸桥的小车。
行走机构行走机构又称“行路机构”,是汽车或拖拉机底盘的一部分,一般包括车架、前桥、后桥、悬挂系统和车轮等结构。行走机构中直接与路面接触的部分是车轮,称为轮式行走机构。此外,还有半履带式行走机构、车轮-履带式行走机构和履带式行走机构等几种。半履带式行走机构在前桥上装有车轮或滑撬,后桥上装有履带,主要用在雪地或沼泽地带行驶。车轮-履带式行走机构有可以互换使用的车轮和履带。履带式拖拉机的行走机构由悬挂系统及履带行走器两部分组成1。
车轮式行走机构车轮式行走机构具有移动平稳、能耗小,以及容易控制移动速度和方向等优点,因此得到了普遍的应用,但这些优点只有在平坦的地面上才能发挥出来。目前应用的车轮式行走机构主要为三轮式或四轮式。
1.三轮式行走机构
三轮式行走机构具有最基本的稳定性,其主要问题是如何实现移动方向的控制。典型车轮的配置方法是一个前轮、两个后轮,前轮作为操纵舵,用来改变方向,后轮用来驱动;另一种是用后两轮独立驱动,另一个轮仅起支承作用,并靠两轮的转速差或转向来改变移动方向,从而实现整体灵活的、小范围的移动。不过,要做较长距离的直线移动时,两驱动轮的直径差会影响前进的方向。
2.四轮式行走机构
四轮式行走机构也是一种应用广泛的行走机构,其基本原理类似于三轮式行走机构。下图所示为四轮式行走机构。其中图a、图b所示机构采用了两个驱动轮和两个自位轮(图a中后面两轮和图b中左、右两轮是驱动轮);图c所示是和汽车行走方式相同的移动机构,为转向采用了四连杆机构,回转中心大致在后轮车轴的延长线上;图d所示机构可以独立地进行左、右转向,因而可以提高回转精度;图e所示机构的全部轮子都可以进行转向,能够减小转弯半径。
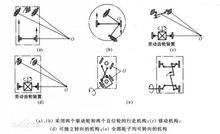
在四轮式行走机构中,自位轮可沿其回转轴回转,直至转到要求的方向上为止,这期间驱动轮产生滑动,因而很难求出正确的移动量。另外,用转向机构改变运动方向时,在静止状态下行走机构会产生很大的阻力。
3.履带式行走机构
履带式行走机构的特点很突出,采用该类行走机构的机器人可以在凸凹不平的地面上行走,也可以跨越障碍物、爬不太高的台阶等。一般类似于坦克的履带式机器人,由于没有自位轮和转向机构,要转弯时只能靠左、右两个履带的速度差,所以不仅在横向,而且在前进方向上也会产生滑动,转弯阻力大,不能准确地确定回转半径2。
本词条内容贡献者为:
石季英 - 副教授 - 天津大学主动台车
图文简介
主动台车是指只有驱动装置,用于驱动起重机行走的行走台车。当起重机的起重量较大时,为了降低车轮上的轮压,采用行走台车作为行走支承装置。有双轮和多轮台车之分。
- 来源: 科普中国科学百科
- 上传时间:2018-11-16
