
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科学报国正当时
科学报国正当时 
每逢节假日自驾出行,高速路上的拥堵与事故总是让人心情不畅;每隔一段时间就会刷屏的自动驾驶惨烈车祸,也让人对高科技下的人身安全充满困惑。作为一个科研工作者,我一直在思考一个问题:我们该如何用最新科技让交通更安全、更顺畅?而智能网联汽车,正是解决这个问题的关键,其核心秘密就藏在“时空感知大数据”与“协同数据智能”里。
很多人对智能网联汽车的认知停留在“车自己会开”的层面,但其实这是个误区。首先要明确,当前我们的技术水平还停留在L2到L3之间,本质上是“辅助驾驶”,远没到达到可以完全脱离人工干预的程度。为什么目前的技术不能使得自动驾驶一步到位?关键问题出在目前的“单机智能”局限上。
一辆“自动驾驶车”其实是个复杂的局部物联网系统,搭载了几十个传感器,其中视觉感知与识别使其能眼观四路;激光雷达能实现毫米级测距,使其能耳听八方;红外设备让其夜间视觉堪比白天;特定的路边磁钉传感器使其即便在雪地行驶也能感知车道。
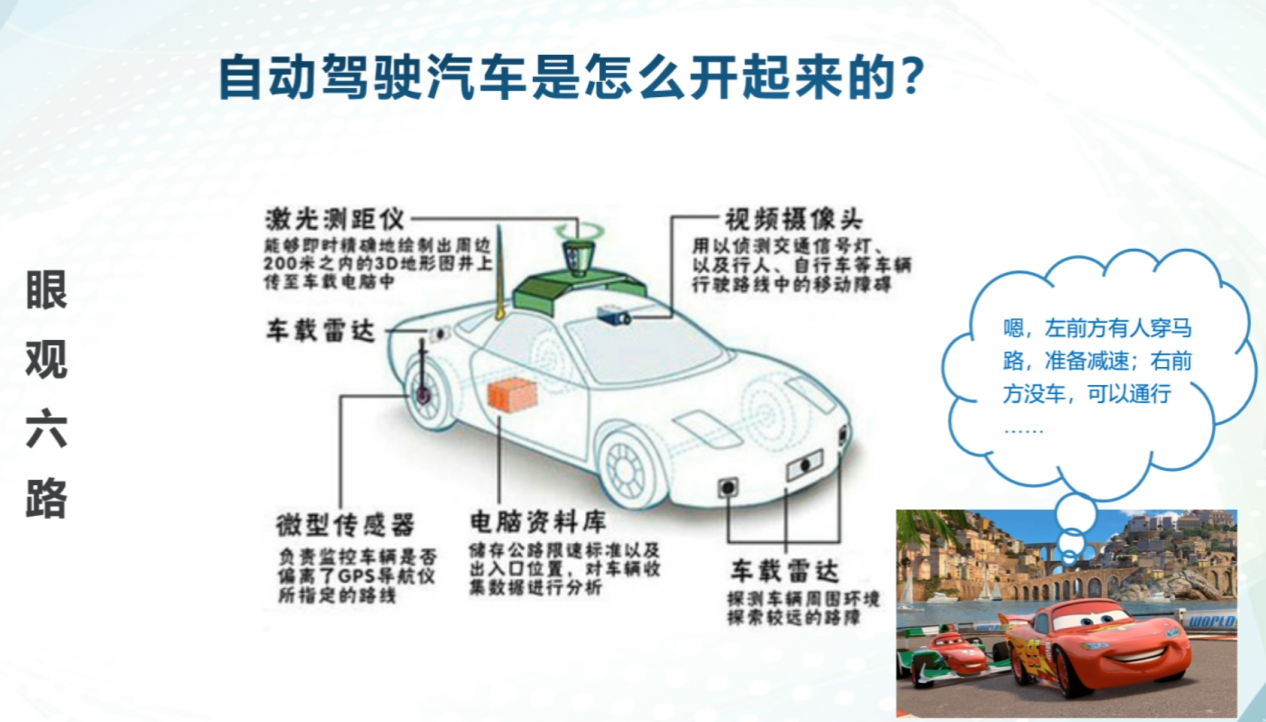
但单机模式的短板也很明显。首先,感知范围存在局限。车辆传感器只能感知有限距离的突发事故或异常情况,无法获得更遥远距离的情况;其次,单机模式会遇到算力瓶颈。因为车载计算平台的算力有限,复杂环境下的全局决策,如恶劣天气下的全城调度,远超其负荷;最后,单机模式存在信息孤岛问题。单车感知犹如盲人摸象,无法获知其他车辆或道路设施“看到”的关键信息,如前方湿滑、路面障碍,无法获得全网总体态势信息。
要突破上述瓶颈,就得跳出“单车思维”,转向“网联思维”,这是智能网联汽车的核心,它不是一个孤立的“聪明车”,而是融入整个交通智慧交通网络的一个“智慧节点”。我们团队的核心工作,就是构建支撑这个智能网络的核心基础设施,如“时空感知大数据平台”和“云边端协同智能计算平台”等。
时空感知大数据是带有地理空间属性和采样时间属性的,来自于各类传感器、遥感遥测装备和多媒体采样设备的数据。具体到智慧网联汽车场景,时空感知大数据不是单辆车的几十个传感器的数据,而是所有车辆、道路、环境的“感知数据总和”。这里面既有静态数据,比如道路的坡度、转弯弧度、地下管网分布等,更有动态数据,比如车辆状态、实时降雨、路面湿滑度、前方车辆遇到的障碍物等。
“时空感知大数据平台”就像是一个“动态版地球”,每秒能接收百万量级的传感器数据,比如车辆状态、路面事件、天气变化、突发事故等,每辆车感知到的“前方有落石、此处湿滑”等信息,都将实时汇聚于此。这个平台还可以整合静态地图,如道路拓扑、坡度与动态信息流,形成覆盖全城的“中枢神经”。当一辆车在弯道颠簸时,后方所有联网车辆都能提前几公里收到预警,从容避让。这不是请求式服务,而是数据共享带来的“超视距感知”,也是单机智能永远做不到的。此外,在面对地震等灾害时,无人机可以快速重建灾区高清三维地图,为救援规划实时道路。
云边端协同智能计算平台,则是一个全网共享的算力调配中心。传统的AI依赖云端集中计算,但车辆、卫星、路侧设备需“现场决策”。所以,云边端协同的人工智能计算中的“云”是中心化云计算、“边”是边缘计算节点、“端”指的是终端设备,三者协同可以提升数据处理效率和响应速度。
上述工作已经在我们承担的“卫星大脑”国家重点研发计划项目中进行了实用验证。智能卫星带有接入地基云计算中心的边缘计算平台,它不仅能够在轨计算并实时感知自身状态,还能够接入云端并实现复杂的感知、任务协同和姿态调整。设想一下,同样的技术应用在无人机上,可以实现“无人机大脑”,在应急灾害处置时,快速完成地貌建模,识别救援通道。
“时空感知大数据”与“云边端协同数据智能”技术应用于智能网联汽车,助力实现未来交通蓝图。所有车辆、道路设施、行人构成一个有机整体,前车感知到的危险会实时广播、救护车驶来前所有车辆会自动让行、拥堵路段会动态调整……这正是我们追求的L4/L5级自动驾驶的基石,让每一次出行都安全、高效、可知、可控,使得真正意义上的自动驾驶得以实现。未来,我们的车将拥有“千里眼”“顺风耳”,并与万物对话,共同编织一张智慧、安全的移动互联网。我们将继续深耕这项技术,让智能网联汽车真正服务于每一个人。
整理:蔡琳
审核:中国科学院软件研究所特聘研究员丁治明
来源: 科学报国正当时
内容资源由项目单位提供
