
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 《中国科学》杂志社
《中国科学》杂志社 
在狭的人体腔道中进行精准操作,一直是微创医疗领域的关键挑战。传统刚性器械难以适应复杂、柔软且狭小的生物环境,而软体机器人因其柔性和生物兼容性,正成为新一代医疗工具的有力候选。但是由于微观力在小尺度下阻碍了微结构的成型,使得高质量流体驱动的软体机器人的设计与制造存在挑战。
近日,上海交通大学机械与动力工程学院谷国迎教授团队提出了一种创新的“迷你气泡成型”(Mini Bubble Casting, Mini-BC)方法,成功制造出毫米尺度的流体驱动软体机器人(Milli-SRs),为精准医疗和微创手术带来了全新可能。
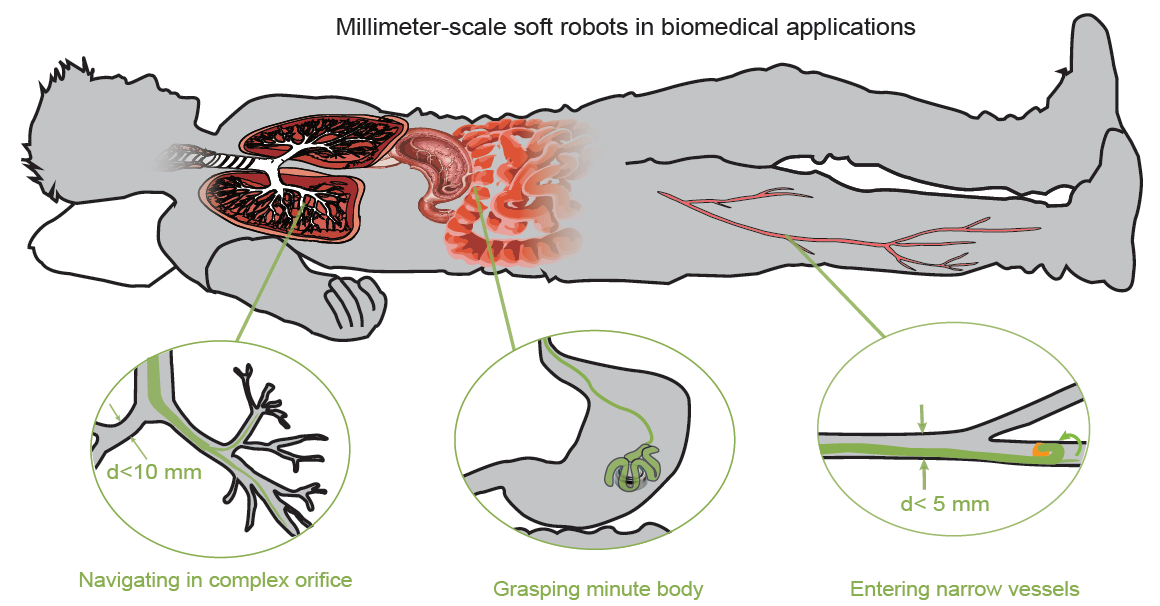
milli-SR机器人可以进入人体狭窄的自然腔道,具有复杂腔道中导航、取出小异物、介入狭窄血管等能力
阻止“气泡破裂”:从“气泡成型”到“迷你气泡成型”
当前,制造毫米级流体驱动软体机器人面临一个核心难题:在微尺度下,越来越强的表面张力与粘性力,让传统的注模成型无法应用。
最新的技术路径是用气泡代替模具的“气泡成型”方法 [Nature 2021],在厘米/亚厘米尺度表现良好。
但是在毫米尺度下,气泡在硅胶液体中极易破裂,导致结构缺陷。本研究探讨了“气泡破裂”的机制,并对其进行针对性的抑制,从而开发出稳定的“迷你气泡成型”方法。
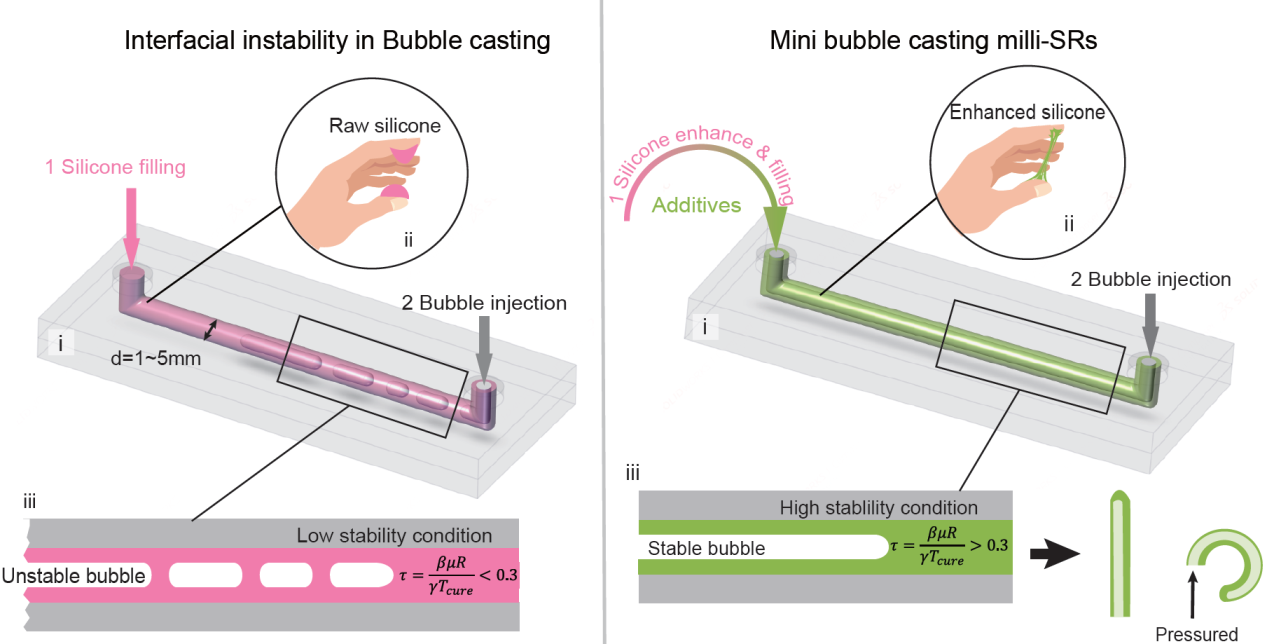
“气泡成型”(左)与“迷你气泡成型”(右)的比较
研究团队从界面失稳的物理机制出发,建立了气泡-硅胶界面的动力学理论模型,发现表面张力粘性阻力之间存在拮抗关系,并提出了一个无量纲稳定性判据,用于预测界面是否失稳:当 τ > 0.3 时,气泡可稳定存在,机器人结构得以完整成型。
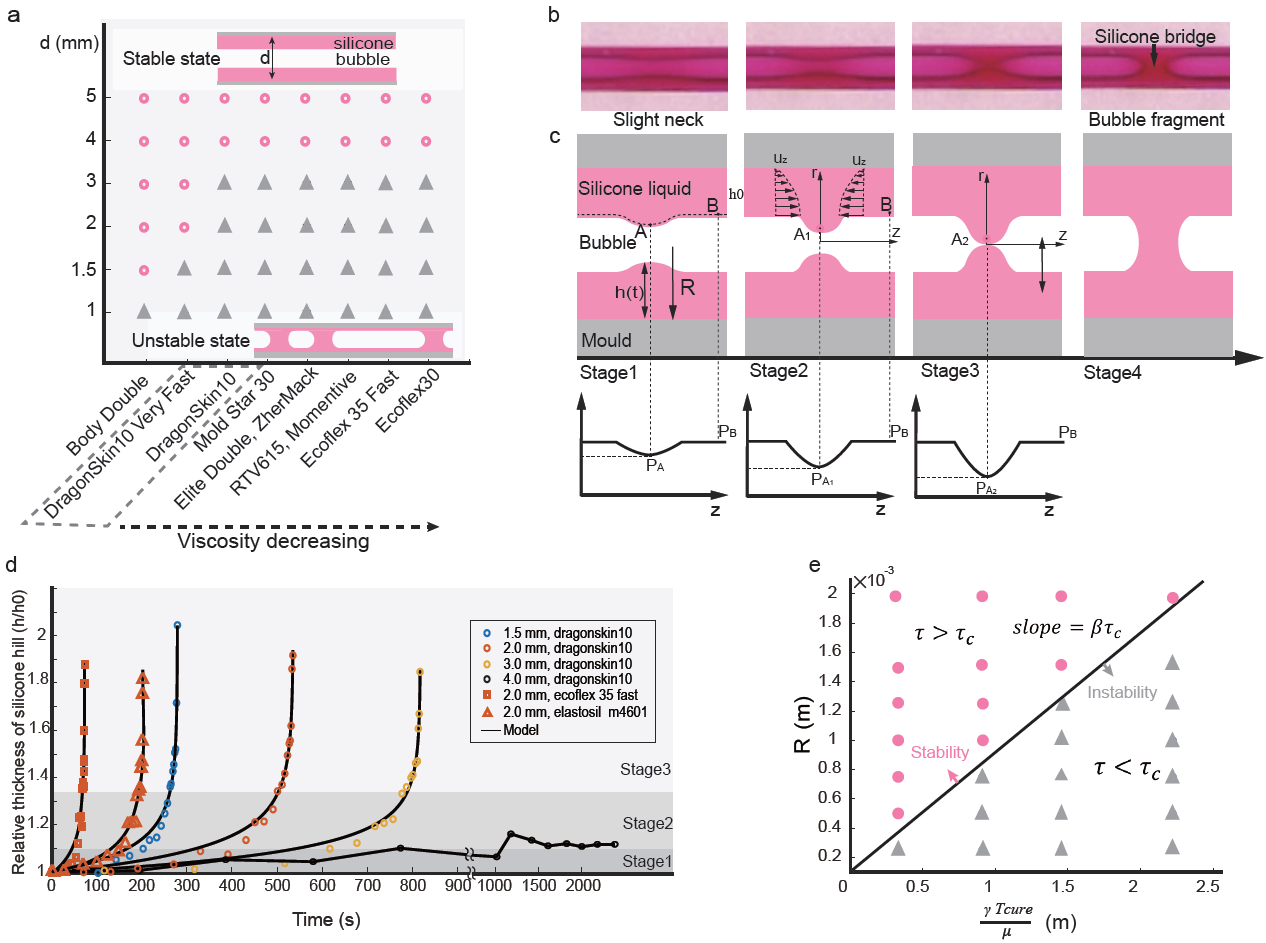
失稳机理。(a)失稳广泛发生,在商用硅胶制备外径小于3mm的流体驱动机器人过程。(b-c)失稳的四个阶段。表面张力引发了胶体层隆起处的“压强势阱”,导致了气泡胶体界面处于不稳定平衡状态,使得界面失稳。(d)胶体隆起处的无量纲厚度h/h(0)随着时间的关系。(e)在不同流变学参数与外径的情况下,界面失稳的发生情况。
应用展示:驱动微型机械、血管介入、软体内镜
基于上述失稳机理,研究团队提出了“迷你气泡成型”方法:添加增稠剂和固化加速剂,提高硅胶的黏度并缩短固化时间,使其在气泡注入后迅速“定型”,从而抑制界面失稳。
利用该方法,研究团队成功制造出多种毫米级软体驱动器,其外径仅为1~3毫米,表面粗糙度低至11.2纳米,尺寸比现有气泡成型产品缩小了一个数量级。整个制造过程仅需约30分钟,操作简便,适合推广。
微型软体驱动器:实现收缩、弯曲、平面变形等多种作动,驱动微旋转副、齿轮组等机械结构。
毫米软钩:特制的软体钩子可深入模拟血管,精准抓取并移除血栓模拟物,为血管介入手术提供新工具。
毫米级软体气管镜:团队还开发出一种集成微型摄像头的柔性支气管镜前端,具备180°全向弯曲能力,可深入至四级支气管,完成复杂路径导航与目标识别,显著提升传统硬质内窥镜的安全性与灵活性。
未来展望
研究团队表示,本工作突破了毫米级软体机器人的制造瓶颈,为其在生物医学领域的广泛应用奠定了基础。未来,他们将结合形状记忆材料、水凝胶涂层、传感模块等技术,开发具备药物释放、环境感知、智能响应等功能的下一代体内机器人系统,实现从“能动手”到“能感知、能决策”的跨越。
团队介绍
谷国迎教授团队主要从事机器人学与软体机器人技术研究,在软体机器人作动机理建模与结构优化领域取得原创性成果。近年来谷国迎教授主持国家杰出青年科学基金、国家重点研发计划等科研项目,在Nature Reviews Materials、Nature Biomedical Engineering、Science Robotics、Science Advances、Advanced Materials、National Science Review、IEEE/ASME Trans.等期刊与会议发表论文百余篇,获得科学探索奖、睿远青年科技奖、上海市自然科学奖一等奖和教育部自然科学奖一等奖。
来源: 《中国科学》杂志社
