
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中国科普博览
中国科普博览 
出品:科普中国
作者:李瑞(半导体工程师)
监制:中国科普博览
在德国开姆尼茨工业大学的实验室里,一群仅有米粒大小的机器人正在水中上演着一场精妙的协同舞蹈。它们时而浮起,时而下沉,彼此之间通过闪烁的光信号传递信息,仿佛在用一种只有它们才懂的语言交谈。这不是科幻电影的场景,而是科学家们最新研发的智能微型机器人——“smartlets”的真实表现。这一命名结合了smart(智慧)和-let(小)两个含义,我们不妨称它为“微智宝”。
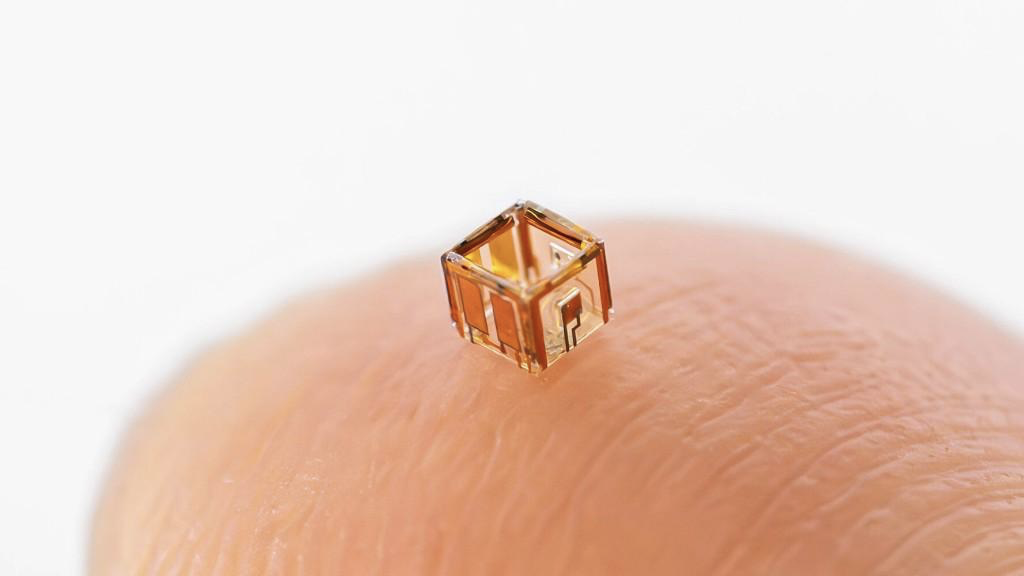
分布式智能微机器⼈“smartlets”
(图片来源:开姆尼茨工业大学)
折纸灵感+硅芯片=会自己“叠”出来的机器人
这项近期发表在《科学·机器人学》期刊上的研究成果,来自开姆尼茨工业大学材料、架构和纳米膜集成研究中心(MAIN)的科研团队。研究人员从折纸艺术中获得灵感,让原本是平面的电子系统能够自主卷曲并折叠成中空的微型立方体。每个微智宝的边长仅有约1毫米,却集成了太阳能收集器、计算单元、光信号系统等多种功能组件。
这种三维结构的巧妙之处在于,它极大地扩展了可用表面积。立方体的内外表面都被充分利用:八条边缘上布置着卷曲的有机太阳能电池,为整个系统提供能源;内部表面装载着硅芯片、微型LED灯和光电探测器;外部表面则预留给未来的对接和组装功能。当阳光照射时,无论微智宝处于何种姿态,总有部分太阳能电池能够接收到光照,实现了真正的全方位能量收集。别看它小,这种设计让每个微智宝能够产生高达37.5微瓦的功率,足以支撑其全部功能运转。
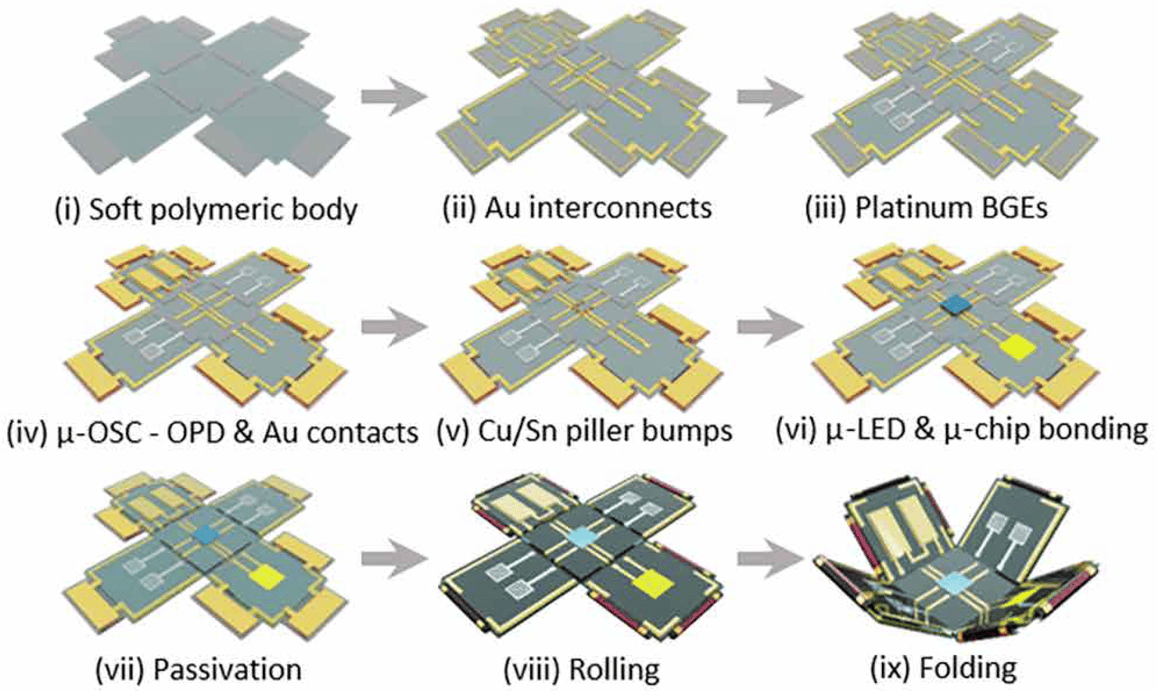
智能微型机器人制造流程示意图
步骤包括:(i) 创建软质聚合物主体;(ii) 金互连层;(iii) 沉积用于气泡发生器(BGEs)的铂和镍;(iv) 微型有机太阳能电池(μ-OSC)和微型有机光电二极管(μ-OPD)制造的中间步骤,包括阳极、电子传输层、光活性聚合物、空穴传输层和金接触层;(v) 制备铜/锡凸点;(vi) 键合微型LED和硅微芯片;(vii) 在刚性面上选择性涂覆SU-8聚合物钝化层;(viii) 卷曲微型有机太阳能电池;最后 (ix) 自组装折叠成立方体。
(图片来源:参考文献1)
像潜水艇一样上下浮沉,靠的是“造泡泡”
微智宝最引人注目的能力之一,是它在水中的自主运动。其秘诀在于,研究团队在机器人内部设计了巧妙的气泡发生器,通过电解水,产生氢气和氧气气泡。这些气泡在机器人中空的内部聚集,改变它的浮力,使其能够像潜水艇一样在水中自由升降。
当搭载的微型处理器接收到特定的光信号指令后,它会启动电解程序:产生的气泡逐渐充满内部空腔,微智宝便会优雅地上浮到水面。停止产生气泡后,残余的气体会慢慢溶解在水中,机器人又会缓缓下沉。整个过程完全自主,无需任何外部控制线缆或磁场操控,真正实现了无线自由。这种运动方式不仅节能高效,而且具有良好的可控性,通过调节气泡产生的速率和时长,可以精确控制微智宝的运动轨迹。
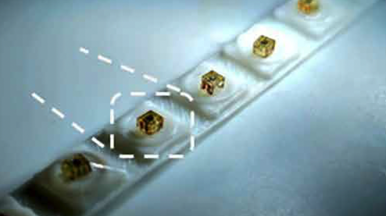
包含智能微型机器人的线性带材,通过光刻工艺制造并平行自组装,除了现在半自动化的试点串行芯片和LED键合工艺外,这种平面工艺可以像LED组装一样高效地缩放到微观尺寸。
(图片来源:参考文献1)
用光“群聊”,机器人之间也能“对暗号”
在如此小的尺度上,如何实现机器人之间的通信是一大难题。传统的无线电波通信需要相对较大的天线,而smartlet采用了一种更加精巧的方案——光通信。每个微智宝都配备了不同颜色的微型LED灯作为发射器,以及光电二极管作为接收器。
这套光通信系统的工作原理类似于摩尔斯电码。当一个微智宝需要向同伴发送指令时,它会通过LED灯发出特定频率和模式的光脉冲。接收方的光电探测器捕捉到这些信号后,内置的微处理器会将其解码成具体的指令。实验显示,在4毫米范围内,微智宝之间可以以1到1000赫兹的频率传输数据,这对于协调集体行为来说已经绰绰有余。
更妙的是,通过使用不同的通信频率和独特的身份识别码,研究人员可以选择性地控制群体中的特定个体。在实验中,当以200赫兹频率发送指令时,只有设定接收该频率的微智宝会响应并开始运动,而其他机器人则保持静止。这种精确的个体寻址能力为构建复杂的机器人集群系统奠定了基础。
相遇之后自动拼接?表面张力在帮忙
除了独立运动和通信,微智宝还展现出了令人惊叹的自组装能力。研究团队在立方体的外表面设计了特殊的亲水-疏水图案,就像是给每个面贴上了独特的“条形码”。当两个微智宝在水中相遇时,如果它们的表面图案互补匹配,就会在表面张力的作用下自动吸引并对接在一起。
这种自组装过程融合了主动运动和被动吸引两种机制。首先,微智宝们通过气泡驱动上浮到水面,在那里它们更容易相遇。当两个机器人靠得足够近时,水的表面张力会将它们拉到一起。如果表面图案匹配,它们就会稳定地连接;如果不匹配,则会相互排斥。通过精心设计表面图案,研究人员成功地让多个微智宝自组装成了字母T、U、C等形状,展示了这项技术在构建复杂结构方面的潜力。
这种自组装能力的意义远不止于简单的形状拼接。在未来,不同功能的微智宝可以根据任务需求自主组合,形成具有特定功能的机器人集群。比如,配备传感器的微智宝可以与具有强大计算能力的微智宝对接,共同完成复杂的环境监测任务。
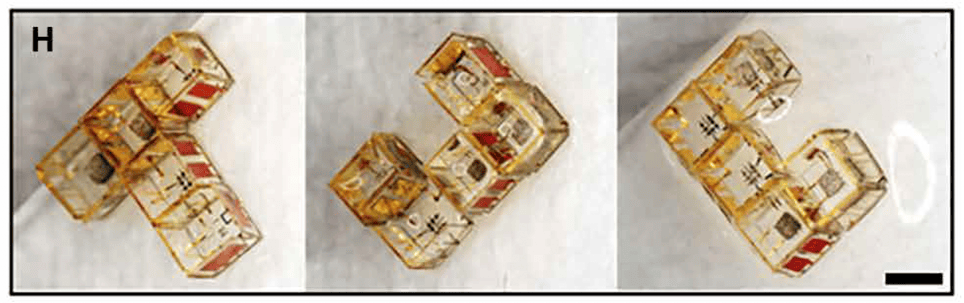
微智宝组装成字母"T"、"U"和"C"。两个或三个智能微型机器人的线性自组装基元与横向放置的智能微型机器人结合,通过自组装对接完成结构
(图片来源:参考文献1)
精打细算的能量管理:阳光就是它们的电池
微智宝的能量管理系统展现了工程设计的精妙之处。整个系统的功率预算被严格控制在微瓦级别,每个组件的能耗都经过精心优化。微型有机太阳能电池在标准光照条件下能够产生最高37.5微瓦的功率,而系统的总功耗在16到33微瓦之间浮动,这种精确的能量平衡确保了机器人的持续运行。
核心的CMOS微处理器采用了180纳米工艺制造,具有两种工作模式:睡眠模式下功耗仅为0.16到0.25微瓦,活跃模式下也只需4.0到6.3微瓦。这种超低功耗设计源于一种被称为“lablet”的特殊芯片架构,它是研究团队专门为微型机器人开发的。芯片内部集成了58位的移位寄存器,可以存储复杂的程序指令,控制机器人的各种行为序列。通过时序电路的精确控制,处理器能够协调LED通信、气泡发生器和传感器的工作,同时将功耗维持在极低水平。
气泡发生器的电解过程是主要的能量消耗者,运行时需要10到25微瓦的功率。为了优化能效,研究团队在电极表面分别镀了铂和镍催化层,显著降低了电解所需的过电位。当功率供应不足时,系统会自动降低电解速率而不是完全停止,确保其他关键功能如通信和计算仍能正常运行。这种优雅的降级策略让微智宝即使在光照较弱的环境中也能维持基本功能。
材料科学的精密编排:从二维到三维的魔法
微智宝的制造过程融合了多种先进的微纳加工技术,其复杂程度堪比现代集成电路的制造。整个过程包含超过60个工艺步骤,每一步都需要纳米级的精度控制。基底材料采用了多层聚合物堆叠结构,包括光敏聚酰亚胺刚性层、水凝胶铰链层和牺牲层,总厚度不超过5微米。
自折叠过程的关键在于应力工程的巧妙应用。研究团队通过在不同材料层中引入预应力,创造了可控的形变驱动力。当牺牲层被选择性溶解后,预应力的释放会驱动平面结构自发卷曲和折叠。有机太阳能电池部分会卷成直径约200微米的管状结构,而连接各个面的铰链则会精确折叠成90度角。整个自组装过程在碱性溶液中进行,pH值的精确控制(从6调节到9)决定了折叠速度和最终形态的稳定性。
特别值得一提的是芯片与柔性基底的连接技术。传统的导电胶粘接方法电阻较大且可靠性有限,研究团队创新性地将固液互扩散(SLID)焊接技术应用到超薄聚合物薄膜上。通过电镀形成10微米厚的铜层和5微米厚的锡层,在真空回流过程中形成稳定的焊点,不仅降低了接触电阻,还能承受折叠过程中的机械应力。这种微米级的焊接技术确保了140微米见方的硅芯片能够可靠地集成到柔性系统中,为实现复杂的电子功能提供了坚实基础。
从实验室到现实:无限可能的应用前景
微智宝的诞生不仅是微型机器人技术的重大突破,更为许多实际应用开启了大门。在医疗领域,这些生物相容的微型机器人可以在人体内进行精准的药物递送或微创诊断。它们可以通过血管到达病灶部位,根据局部环境的化学信号自主释放药物,或者收集组织样本用于检测。
在环境监测方面,成千上万的微智宝们可以被释放到湖泊、河流或海洋中,形成一个分布式的传感网络。每个机器人都可以检测水质参数、污染物浓度或微生物活动,通过光信号将数据传递给附近的同伴,最终汇总成完整的环境状况图。这种方法比传统的定点监测站更加灵活和全面,可以追踪污染源的扩散路径,及时发现环境异常。
研究团队已经在过滤后的天然湖水中成功测试了微智宝的各项功能,证明它们能够在真实的水环境中稳定工作。尽管目前的原型还需要依靠光照提供能量,但研究人员正在探索集成化学能源或其他能量采集方式,以扩展微智宝的应用范围。
迈向智能集群的未来
微智宝的成功研发标志着微型机器人技术进入了一个新时代。这些机器人不再是简单的执行器,而是具备了感知、思考、交流和协作能力的智能体。它们的出现让人联想到自然界中的群居生物,如蚁群、蜂群或者海洋中的管水母群落。每个个体虽然简单,但通过协作可以完成远超个体能力的复杂任务。
研究团队的下一步计划是进一步提升微智宝的自主性和智能水平。他们正在开发化学和声学传感模块,让机器人能够感知更多类型的环境信息。同时,通过优化微处理器的程序,微智宝将能够执行更复杂的决策和学习算法。未来的微智宝甚至可能具备一定的适应性和进化能力,根据环境变化调整自己的行为策略。
从更长远的角度看,这项技术可能会推动一个全新研究领域的诞生——“微型机器人生态学”。当大量具有不同功能的微智宝在同一环境中共存时,它们之间会形成复杂的相互作用网络,就像一个人工的微观生态系统。研究这个系统的运行规律,不仅能够帮助我们更好地设计和控制机器人集群,也可能为理解生命系统的组织原理提供新的视角。
微智宝的故事才刚刚开始。这些在水中翩翩起舞的微型机器人,正在用它们独特的方式诠释着智能与协作的真谛。它们让我们看到,即使是最微小的个体,通过巧妙的设计和精密的协作,也能创造出令人惊叹的集体智慧。在不久的将来,当这些微型机器人真正走出实验室,进入我们的生活时,它们将以我们意想不到的方式,改变这个世界。
参考文献:
【1】Yeji Lee et al. ,Si chiplet–controlled 3D modular microrobots with smart communication in natural aqueous environments.Sci. Robot.10,eadu6007(2025).DOI:10.1126/scirobotics.adu6007
来源: 中国科普博览
内容资源由项目单位提供
