
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 《中国科学》杂志社
《中国科学》杂志社 
研究者研制出一种多腔室磁控胶囊机器人。该机器人可通过外部磁场控制,在一次吞服后,于消化道不同位置或时间点,独立、选择性地执行液体采样或药物释放任务。相关成果发表于《国家科学评论》(National Science Review),澳门大学吴泽浩博士为论文的第一作者,澳门大学徐青松教授与香港大学陆洋教授为共同通讯作者。
吞服式胶囊机器人为胃肠道疾病提供了微创诊疗新途径。然而,由于增强功能之余,保持简易的制造过程,现有胶囊机器人难以同时实现诊断与治疗功能。诊断和治疗往往是分离的,这增加了患者的负担和时间成本。
针对这一挑战,研究团队打造了一个采用模块化构型的多腔室胶囊机器人。该机器人每个腔室都相当于一个可独立控制的“微型仓库”或“采样瓶”,均嵌有基于柔性机构的磁响应阀门。更重要的是,磁响应阀门可通过激光切割机批量加工,同时具有易于装配的优点。
磁控密钥
如何精准控制特定腔室在指定地点“开门”,是最大的技术挑战之一。研究团队的解决方案是为每个腔室配备一个具有方向特异性的磁响应柔性阀门。这就像给每个仓库配了不同的“磁力钥匙”。只有当外部梯度磁场的方向与某把“钥匙”唯一匹配时,对应的阀门才会打开,否则继续保持紧闭。更重要的是,这种“选择性开启”功能与驱动胶囊在消化道内滚动的旋转磁场控制完全解耦,意味着机器人在运动过程中不会意外触发,确保了操作的精准与安全。
此外,基于磁响应柔性阀门的模块化设计意味着腔室的数量和功能可根据临床需求灵活调整,未来,它可同时携带不同的药物进行组合疗法,或在多个可疑病灶点进行采样,大大提升诊疗效率。
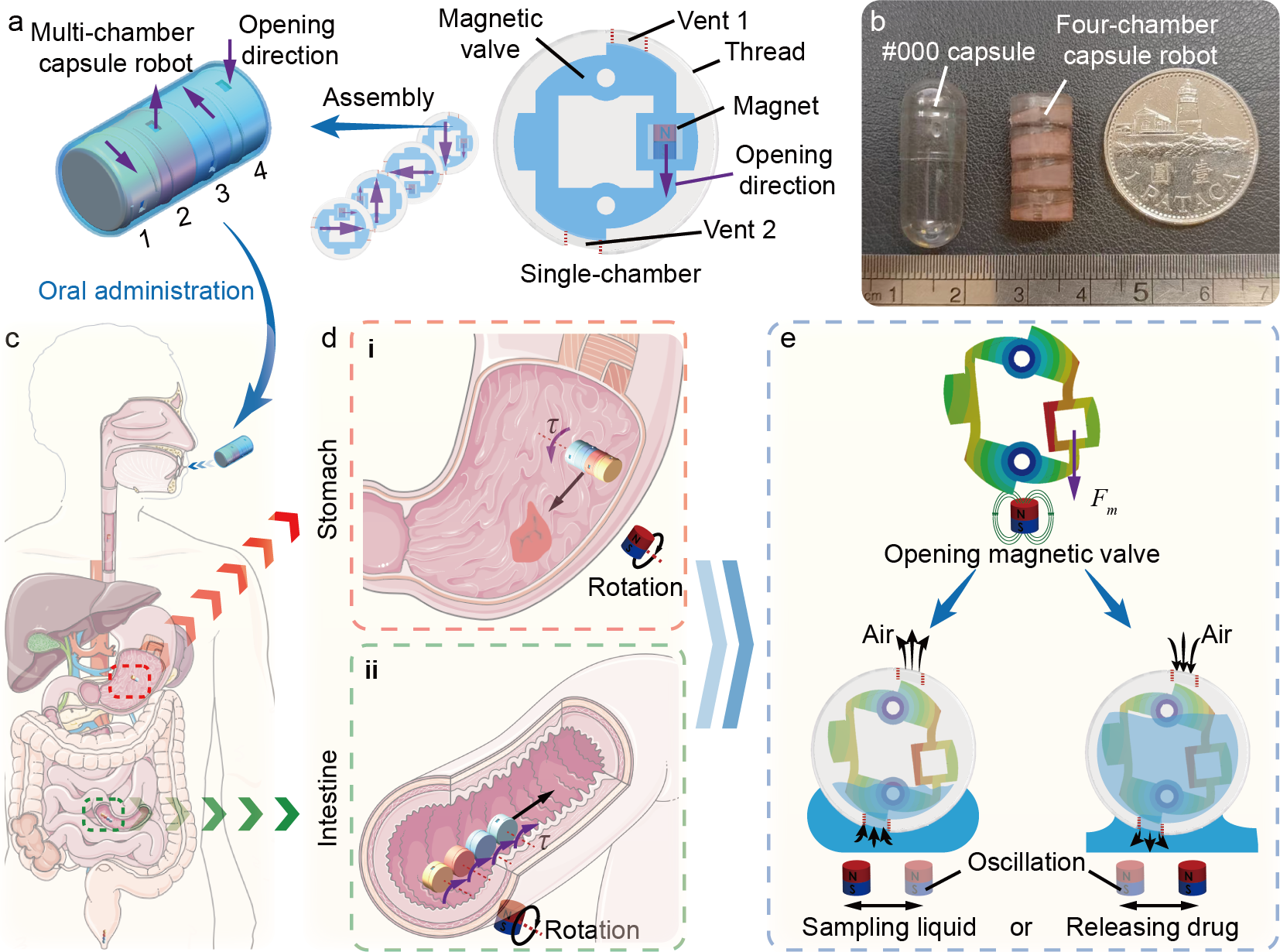
多腔室磁控胶囊机器人的结构与工作流程示意图。(a)带有四个不同开启方向单腔胶囊的多腔胶囊机器人示意图。(b)多腔胶囊机器人原型机。(c)胶囊机器人在消化道中导航示意图。(d)胶囊机器人在(i)胃部和(ii)肠道中滚动导航示意图。 (e)胶囊机器人通过打开磁阀来采集液体并释放药物示意图。
功能展示
在离体猪胃实验中,研究人员在超声实时引导下,成功操控机器人滚动至目标位点。此外,分别在不同的地点触发了不同腔室,先后完成了液体采样和药物释放工作,验证了其功能执行的可靠性。此外,研究团队还演示了通过该机器人进行原位生成水凝胶药物贴片的技术:将形成水凝胶的两种试剂分装于不同腔室,依次释放后可在病灶处形成一层载药凝胶,实现药物的长效缓释,这对于一些消化道疾病的治疗具有重要意义。
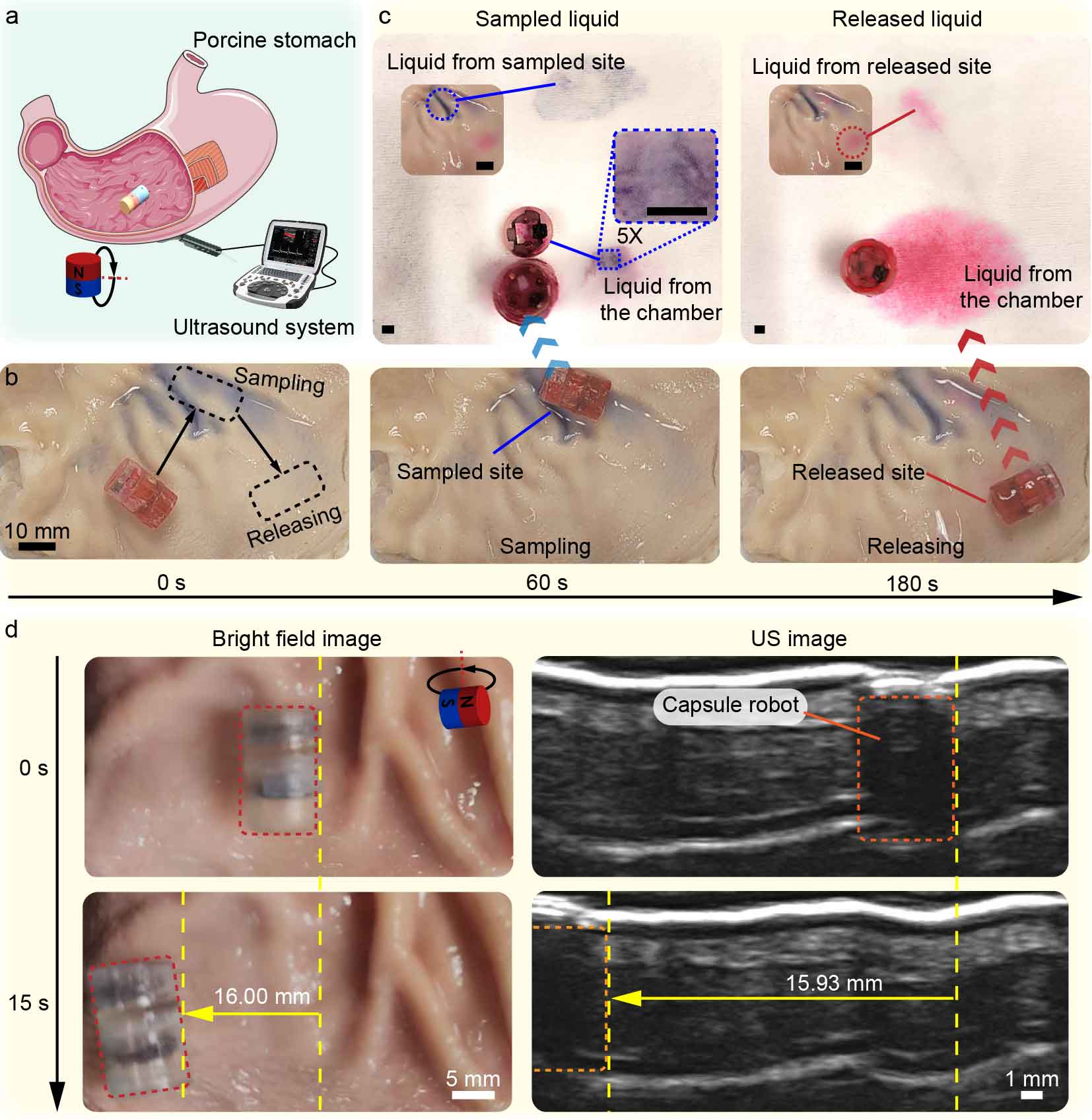
离体猪胃实验。(a)实验装置示意图。(b)胶囊机器人依次在不同部位执行活检和药物释放。(c)腔道内和执行位置的液体对比。比例尺为 2 毫米。(d)通过滚动运动在猪胃中进行导航的明场图像和超声图像。
未来展望
该项研究突破了现有胶囊机器人的局限,推动了胃肠道无创精准诊疗的发展。随着未来进一步的研究验证,这款多功能胶囊机器人有望提升胃肠道疾病的临床诊疗模式,减少患者治疗负担。
来源: 《中国科学》杂志社
