
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助

1948年10月29日,英国数学家威廉・罗斯・阿希贝在英国巴恩伍德医院的实验室里,完成了一台改写科技史的装置
——稳态机,能在各种变化的外界条件下自行组织,以达到稳定状态,这是他幻想的人造大脑的最初雏型、提出了机器人的最早设想。这台由皇家空军炸弹控制单元改造的机器,虽布满真空管与充水电位器,却首次实现了“在环境扰动中自行稳定”的奇迹,被《时代》周刊后来评价为“人类迄今最接近人造大脑的发明”。
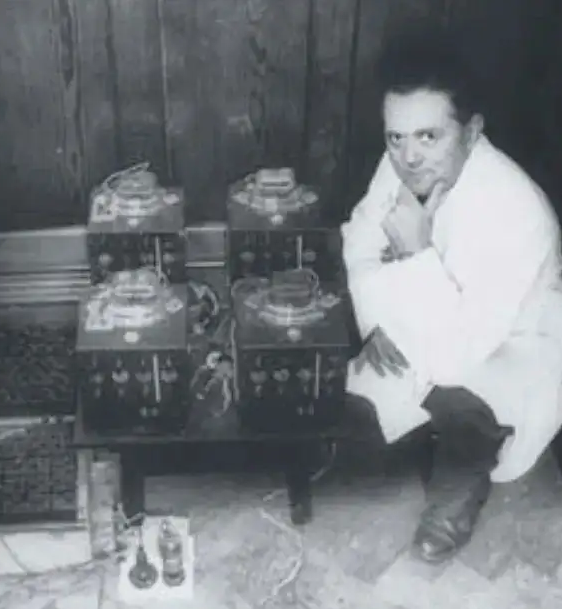
1948年,阿希贝与稳态器
这台重达数十公斤的装置暗藏玄机,四个模块通过20条反馈回路相连,核心是磁驱动的充水电位器——当外界干扰导致电压偏离零点时,模块会随机切换电路参数,直到系统恢复平衡。阿希贝在日记中记录过经典实验:人为反转电路极性后,机器仅用 12 次参数调整便重新稳定,如同生物趋利避害的本能。
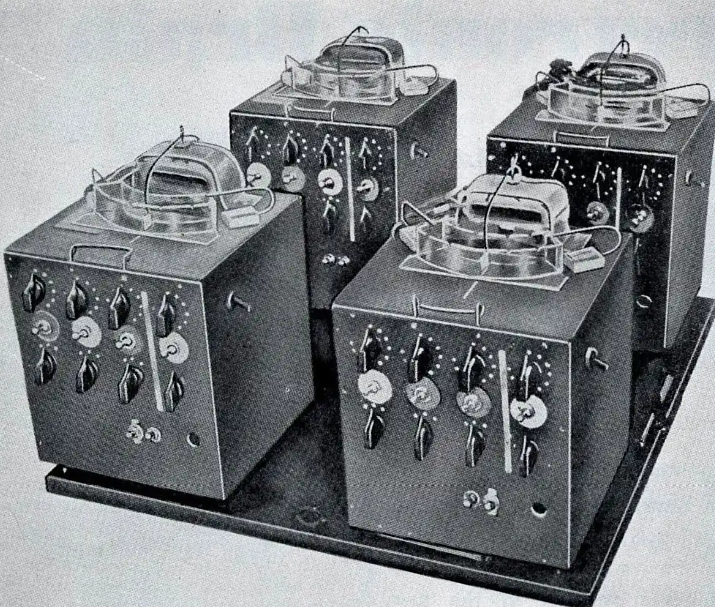
稳态器
这种“自镇定”原理源自阿希贝的“必要多样性法则”:控制器的内部状态需不少于被控系统,才能应对复杂扰动。与当时固定程序的机器不同,稳态机无需人类预设指令,靠随机试错实现自组织,这正是其“大脑雏型”特质的核心。
鲜为人知的是,稳态机的诞生源于阿希贝的双重身份,既是数学家,也是治疗精神疾病的医生。他观察到患者大脑的自我调节机制,萌生用机器模拟生命稳态的想法。1946年设计之初,图灵曾建议用ACE计算机模拟,但阿希贝坚持造实体机器:“大脑不是程序,是硬件的自组织”。
这台机器的意义远超技术突破。1948年12月,阿希贝在《电子工程》杂志发文《设计一个脑》,直言稳态机未来或下棋超越人类”。这种“机器可能产生自主智能”的设想,在战后引发震动——“机器人”概念虽早有提及,但阿希贝首次给出了可实现的技术路径,通过自组织系统模拟认知。
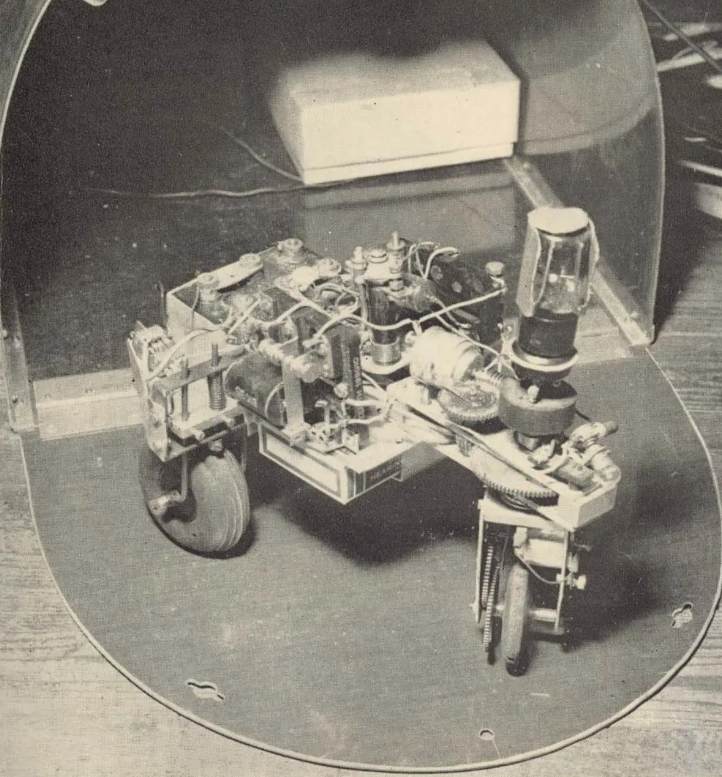
小型移动机器人
1952 年,在知名学术会议梅西控制论会议上,稳态机的演示让维纳等学者惊叹不已,但阿希贝终因技术限制未能实现“通用大脑”:模块扩展后,参数组合爆炸导致稳定时间呈指数增长。1970年,这台机器在伊利诺伊大学被洪水损毁,但其思想已渗透进人工智能领域。

1950年代的“控制论四先驱”,最左边的是罗斯・阿希贝
如今的深度学习模型通过参数迭代寻找最优解,自动驾驶系统实时调整行车状态,本质上都是稳态机“扰动-适应”逻辑的延续。
参考来源:科普中国、澎湃新闻、《中国大百科全书》
来源: 江苏省科学技术协会
内容资源由项目单位提供
