
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 迷彩视线
迷彩视线 
引言
随着人类对太空探索的不断深入,越来越多的卫星和空间站被送入地球轨道。然而,这些航天器在运行过程中难免会遇到各种问题,如故障、老化或遭受碎片撞击等。为了确保这些昂贵的设备能够继续发挥作用,科学家们开发了一种高科技解决方案——在轨维修机器人。本文将详细介绍这种机器人的核心组件之一:高精度机械臂,以及它如何为航天器撑起一片防御“保护伞”。
1. 在轨维修机器人概述
1.1 什么是在轨维修机器人?
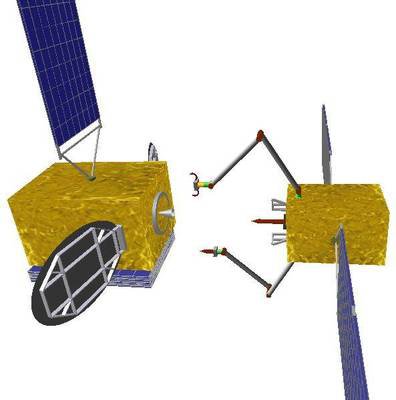
在轨维修机器人是一种专门设计用于在太空环境中执行维护、修复和升级任务的自动化设备。它们通常由飞控系统、导航系统、机械臂以及各种工具和传感器组成。
1.2 为什么需要这样的机器人?
由于太空环境极端恶劣,人类宇航员直接进行维修任务不仅风险高,而且成本巨大。因此,利用在轨维修机器人可以大大降低风险和成本,同时提高维修效率。
2. 高精度机械臂的作用与特点
2.1 机械臂的基本功能
高精度机械臂是在轨维修机器人的核心部件之一,它的主要功能包括抓取、移动、定位和安装/卸载部件等。通过高精度的操作,机械臂可以完成许多复杂的维修任务。
2.1.1 精确操作
高精度机械臂能够进行毫米级甚至更高精度的操作,确保维修过程的准确性和安全性。
2.1.2 灵活运动
机械臂通常具有多个关节,可以实现多自由度的运动,从而适应不同的维修场景。
2.2 机械臂的技术优势
与传统的地面机器人相比,在轨维修机器人的机械臂具有以下几个显著优势:
2.2.1 抗辐射能力:太空中的高能粒子辐射会对电子设备造成损害,因此机械臂需要具备良好的抗辐射性能。
2.2.2 耐低温特性:太空中的温度极低,机械臂的材料和润滑油需要能够在极端低温下正常工作。
2.2.3 远程控制:由于宇航员无法直接干预,机械臂需要能够接受地面控制中心的远程指令,并自主完成复杂任务。
3. 未来展望与挑战
3.1 技术进步带来的机遇
随着材料科学、人工智能和通信技术的不断进步,未来的在轨维修机器人将更加智能化、高效化。例如,通过采用先进的机器学习算法,机器人可以自动识别故障并进行自我修复;而新型材料的使用则可以进一步减轻机器人的重量,提高其机动性。
3.2 面临的挑战与应对策略
尽管前景广阔,但在轨维修机器人的发展仍面临诸多挑战,如如何在失重环境下保持稳定的操作、如何避免与周围物体发生碰撞等。为了克服这些难题,研究人员正在开发更加先进的传感器和控制系统,以提高机器人的适应性和安全性。
结论
总之,高精度机械臂作为在轨维修机器人的重要组成部分,为航天器的维护和防御提供了强有力的支持。随着技术的不断进步,我们有理由相信,在不远的将来,这些高科技设备将在太空探索中发挥更加重要的作用,为人类的太空活动提供更加坚实的保障。
本文图片来自于互联网。
本文来源于昆明学院2025年校级教育教学改革研究项目。
作者:龙瀛,男,1981年生,广西灵川人,中共党员,国家安全学学者,现任昆明学院云南智慧边防与人工智能安全治理协同创新实验室主任,主要研究方向为太空安全。社会兼职:中国自动化学会空间及运动体控制专委会会员、中国指挥与控制学会航天指挥控制专委会会员、中国空间科学学会空间生命专委会会员、中国宇航学会航天政策与法律专委会会员。
来源: 迷彩视线
