
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中国城市规划学会
中国城市规划学会 骑过自行车的人都有这样的体验:车子静止时很难保持直立,可一旦动起来却能稳稳前行,甚至灵活转弯。这个看似寻常的现象,实则困扰了物理学家多年,其背后是物理结构与人体调控共同作用的复杂机制。
静止时:难以满足的平衡条件

自行车在静止时“站不稳”,核心原因在于支撑结构与重心之间的矛盾。它的两个车轮接地点几乎在一条直线上,无法像三轮车或桌子那样形成稳定的三角支撑;同时,车架、车把等部件又使自行车整体重心偏高。
从物理学角度看,静态平衡需要满足三个关键条件:合力为零、合力矩为零、重心投影在支撑面内。而自行车的线性支撑面窄,重心稍有偏移就会打破平衡,导致倾倒。
动起来:不止是“陀螺效应”在发力
提到自行车在动态中的平衡,很多人会想到“陀螺效应”——车轮高速旋转产生稳定角动量,如同高速转动的陀螺能直立不倒,转速越快似乎越稳。这一说法虽有道理,却并非关键。
科学家为了验证陀螺效应是否是保持平衡的关键,做了一个实验:他们造了一辆特殊的自行车,使前轮无法自由旋转,或者将其角动量中和。令人惊讶的是,这辆车在无人控制的情况下依然能够短暂地保持直立并前行。这项实验说明,陀螺效应虽然在稳定性中有一定作用,但并不是自行车能够保持平衡的决定性因素,真正的核心是“转向自稳机制”。
核心机制:前轮设计的“自动矫正术”
自行车的平衡密码,其实隐藏在前轮的结构里。细心观察会发现,自行车前叉并非垂直安装插在车架上,而是带有一定的前倾角度,这一设计使前轮接地点落在车把转向轴前方,形成一个名为“拖曳距”的关键结构。
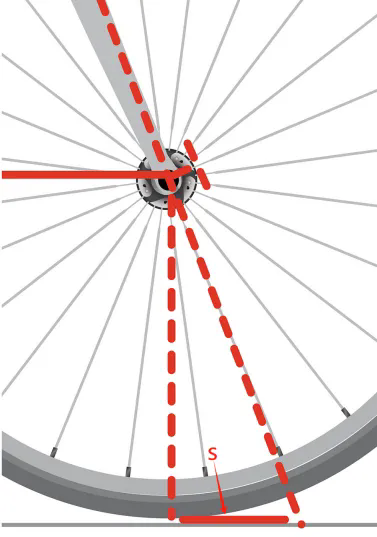
图中的距离s即为“拖曳距”
当骑行者身体向左倾斜时,车体随之左倾,前轮在重力与拖曳距的作用下会自动向左偏转。此时自行车会沿左弯路径行驶,过程中产生的离心力会将重心“拉回”车轮之间,完成平衡矫正。整个“车倾—轮偏—路径弯曲—离心修正”的过程形成一个自动闭环,骑行者甚至难以察觉。
平衡助力:人体的“微调控制系统”
当然,自行车的平衡也离不开骑行者的参与。车辆的自稳机制虽能应对大部分情况,但在实际骑行中,人的大脑、神经系统和肌肉仍会持续进行微调:当感觉车身即将向右倒时,会下意识右转车把,或轻微左移重心,这些调整由小脑控制,是高度自动化的本体感觉反应。
值得注意的是,速度会影响平衡效果。快速骑行时,转向自稳机制更易发挥作用,陀螺效应也更强,车身更稳;慢速骑行时,离心力减弱,自行车自稳效果变差,平衡更多依赖骑行者的控制能力,这也是初学者往往在慢骑时容易摔倒的原因。
科学家曾设计过无人驾驶的自行车,它能靠自身结构在特定路径上直线行驶几十米,虽然最终仍会失稳,但足以证明自行车本身具备“自我稳定性”。这种“动则稳、静则倒”的现象,正是物理结构与人体调控共同打造的奇妙平衡,也让我们再次看到日常小事中蕴含着深刻的科学智慧。
来源: 科普山东
