
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 《中国科学》杂志社
《中国科学》杂志社 
磁性软连续体机器人同时结合了磁场的生物相容性和远程驱动能力以及软材料的柔顺变形特性,在生物医疗领域应用前景广阔。其中,硬磁软连续体机器人因其具备可编程的磁畴和实现可逆大变形的能力而备受关注。中国科学技术大学近代力学系王柳教授团队在《中国科学:物理学 力学 天文学》英文版2025年第10期发表综述文章,系统地总结了硬磁软连续体机器人在力学建模、优化设计以及医疗应用上的最新进展和面临挑战,为该领域的相关研究做出阶段性概括并指明未来发展方向。
根据磁化特性的不同,磁性软材料可以分为三类:软磁、超顺磁和硬磁,其中硬磁软材料具有高剩磁,高矫顽力的独特优势,能够在驱动磁场范围内保持稳定的磁化性质,是硬磁软连续体机器人的核心构成。对于硬磁软材料,研究者们分别基于微观和宏观视角开发了众多本构模型。例如,在连续介质框架内的理想硬磁软材料模型以及考虑黏弹性的力磁耦合本构模型,从微观角度出发,考虑硬磁颗粒间偶极-偶极相互作用的本构模型以及显式耗散模型等。尽管这些本构模型能够精准描述硬磁软材料的力磁耦合力学行为,微观构型与宏观响应的多尺度关联机制仍需进一步研究。
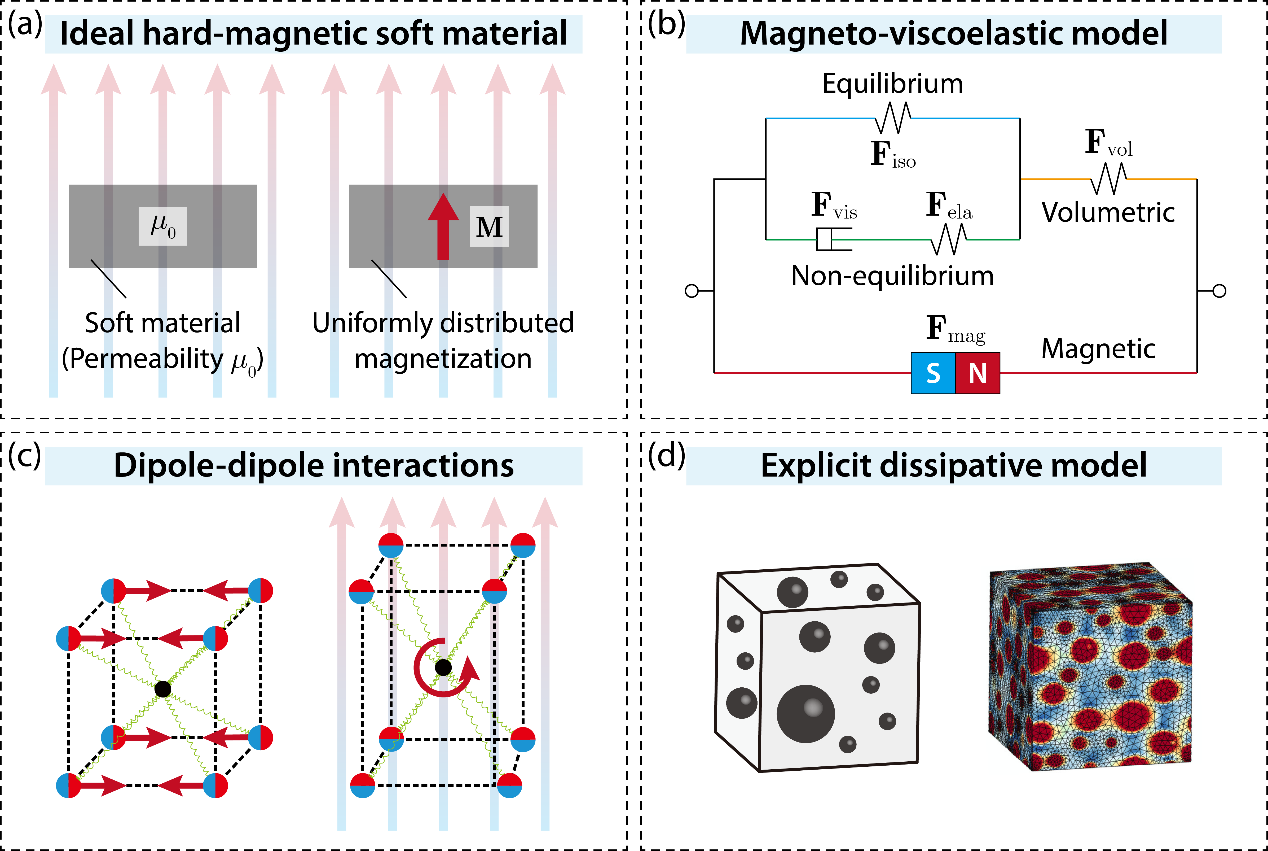
图1 硬磁软材料的本构模型 [1]
硬磁软连续体机器人通常为细长结构,为了描述其在磁场驱动下的力磁耦合变形和运动并进一步实现精准控制,研究者们提出了许多力学模型。对于基于磁颗粒的硬磁软连续体机器人,其驱动源为分布的磁力和磁力矩。研究者们提出了多种静力学模型,如弹性细长杆模型,基尔霍夫杆模型等,在此基础上,一些模型还进一步考虑了几何约束,非均匀磁场等环境因素的影响,能够精准地捕捉机器人的力磁耦合大变形。
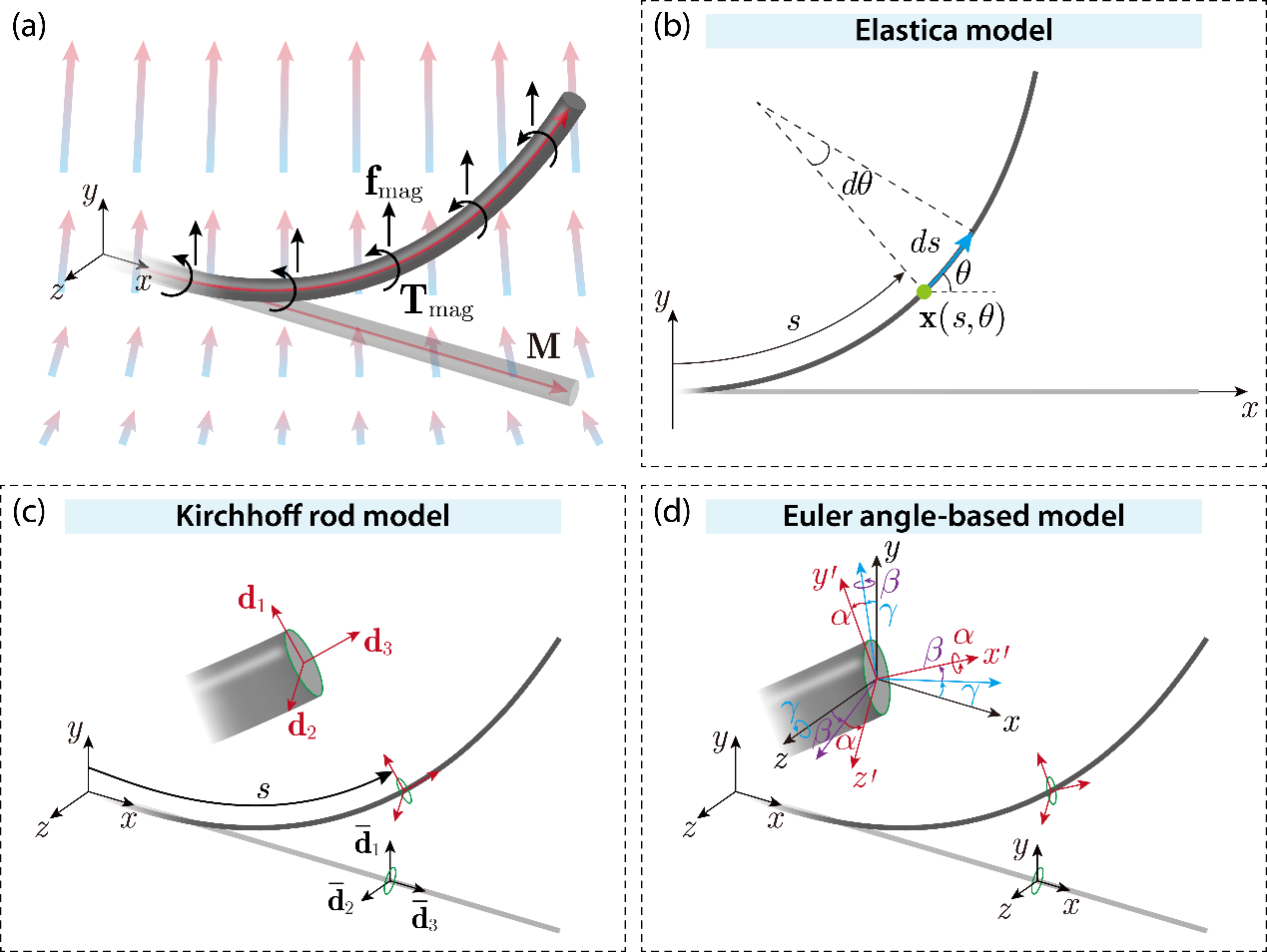
图2 基于磁颗粒的硬磁软连续体机器人的静力学模型
此外,研究者们还开发了许多硬磁软连续体机器人的动力学模型,进一步衡量了摩擦接触、阻尼耗散、流固耦合等复杂环境相互作用的影响,并采用多种数值方法对机器人在多模态磁场驱动下的运动进行模拟仿真。然而,基于磁颗粒的硬磁软连续体机器人的受力状态和变形模式较为复杂,当前的研究很少涉及机器人的运动控制,未来基于这些力学模型,可以进一步开发多物理场耦合以及考虑环境交互的机器人控制框架,实现硬磁软连续体机器人更为智能的操控。
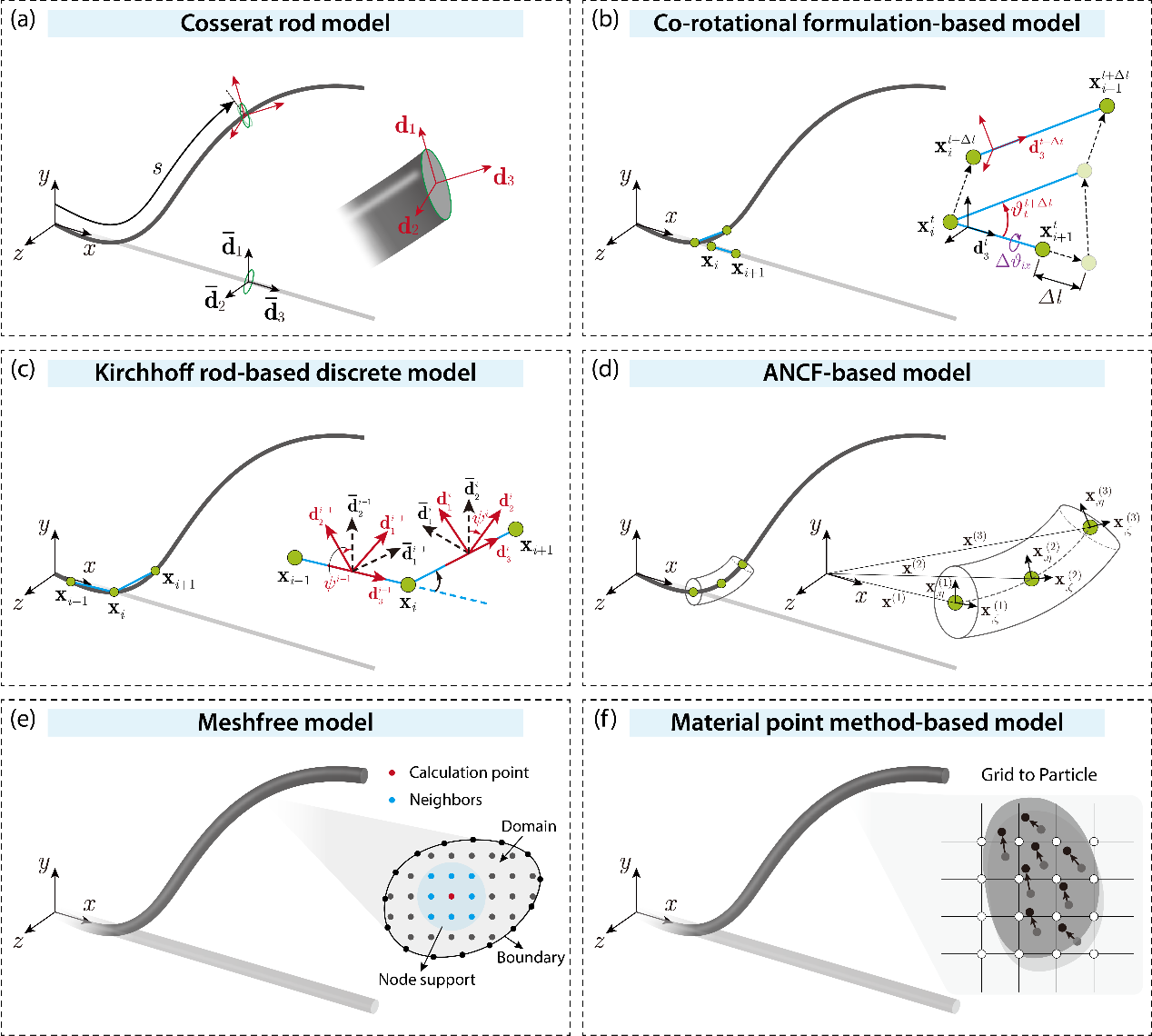
图3 基于磁颗粒的硬磁软连续体机器人的动力学模型
硬磁软连续体机器人被广泛应用于人体的微创介入手术。硬磁软连续体机器人能够在磁场驱动下灵活穿梭心脑血管、肾脏等部位,实现人体腔道内的快速导航,未来,结合影像技术与控制算法,硬磁软连续体机器人有望实现介入手术中的安全自主导航。此外,现有的硬磁软连续体机器人能够携带微型照相机,在胃肠道、肺等部位实现内窥镜诊断和治疗,未来,硬磁软连续体机器人有望携带更加小型化和更高分辨率的成像设备,实现人体复杂腔道内更精准的内窥镜诊断。
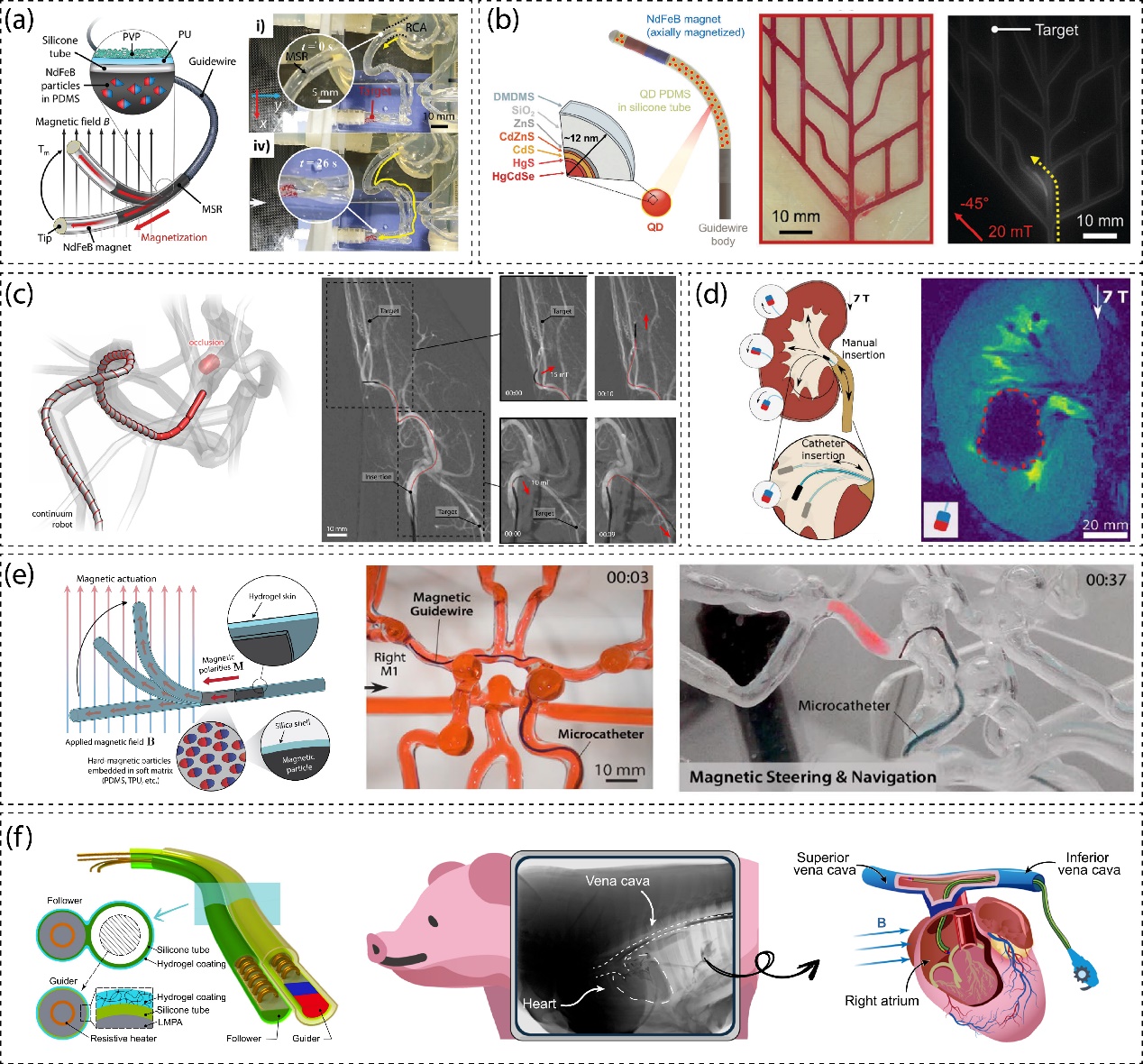
图4 硬磁软连续体机器人用于人体腔道内的导航[2~8]
综上所述,近年来硬磁软连续体机器人在材料本构、力学建模和优化设计上进展迅速,在生物医疗领域有着巨大的应用潜力,未来,更先进的材料制备工艺,更精准的力学模型和控制算法以及更完善的设计将推动硬磁软体机器人从实验室走向临床应用。
【参考文献】
1. D. Mukherjee, M. Rambausek, and K. Danas, J. Mech. Phys. Solids 151, 104361 (2021).
2. J. Hwang, S. Jeon, B. Kim, J. Kim, C. Jin, A. Yeon, B. Yi, C. Yoon, H. Park, S. Pané, et al., Adv Healthcare Mater. 11, e2102529 (2022).
3. J. Hwang, B. Kim, C. Jin, G. Lee, H. Jeong, H. Lee, J. Noh, S. J. Lim, J. Kim, and H. Choi, Small 21, e2404251 (2025).
4. R. Dreyfus, Q. Boehler, S. Lyttle, P. Gruber, J. Lussi, C. Chautems, S. Gervasoni, J. Berberat, D. Seibold, N. Ochsenbein-Kölble, et al., Sci. Robot. 9, eadh0298 (2024).
5. Y. Kim, E. Genevriere, P. Harker, J. Choe, M. Balicki, R. W. Regenhardt, J. E. Vranic, A. A. Dmytriw, A. B. Patel, and X. Zhao, Sci. Robot. 7, eabg9907 (2022).
6. M. E. Tiryaki, Y. G. Elmacıoğlu, and M. Sitti, Sci. Adv. 9, eadg6438 (2023).
7. Y. Kim, G. A. Parada, S. Liu, and X. Zhao, Sci. Robot. 4, eaax7329 (2019)
8. L. Mao, P. Yang, C. Tian, X. Shen, F. Wang, H. Zhang, X. Meng, and H. Xie, Nat. Commun. 15, 3759 (2024).
来源: 《中国科学》杂志社
