
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科普中国创作培育计划
科普中国创作培育计划 
想象一下,如果你不小心伤到了两条腿,会发生什么?对我们来说,可能意味着长时间的康复训练,甚至永久性的行动受限。但对某些动物来说,断腿似乎并不是什么大不了的事。比如蜘蛛——这种拥有八条腿的节肢动物,不仅可以主动断腿来逃脱危险,而且能在断腿之后,依然保持飞快的移动速度。

狼蛛断腿后也能快速移动(图片来源:作者使用AI生成)
更令人惊讶的是,一项2025年发表的新研究显示,即使失去了两条腿,蜘蛛也不一定学会新的走路方式,而是天生就能使用多种混合步态,就好像身体里内置了某种应急算法。这项研究不仅揭示了蜘蛛惊人的身体调控能力,也为仿生机器人、神经控制系统等技术发展提供了全新的启发。
从断腿到复跑,蜘蛛是怎么做到的?
为了深入了解蜘蛛如何应对肢体损伤,美国天普大学和哈弗福德学院的研究团队选择了一种叫做危地马拉虎臀狼蛛(Davus pentaloris)的种类作为研究对象。这种狼蛛体型较大,奔跑速度快,且具备天然的断肢自愈能力,是研究步态适应的理想模型。
研究人员对这些尚未经历过任何断肢的幼年蜘蛛进行了一系列设计巧妙的实验。他们先记录了蜘蛛在肢体完整时的奔跑姿态,随后使用胶水轻轻固定其右侧第一足和左侧第四足,让蜘蛛在清醒后自行自割断肢。接着,他们立即进行高帧率录像,从上方捕捉蜘蛛奔跑时的每一个动作细节。这还没完,蜘蛛被允许自然再生断肢,等数周新腿长出后,研究者又重复了同样的实验流程。
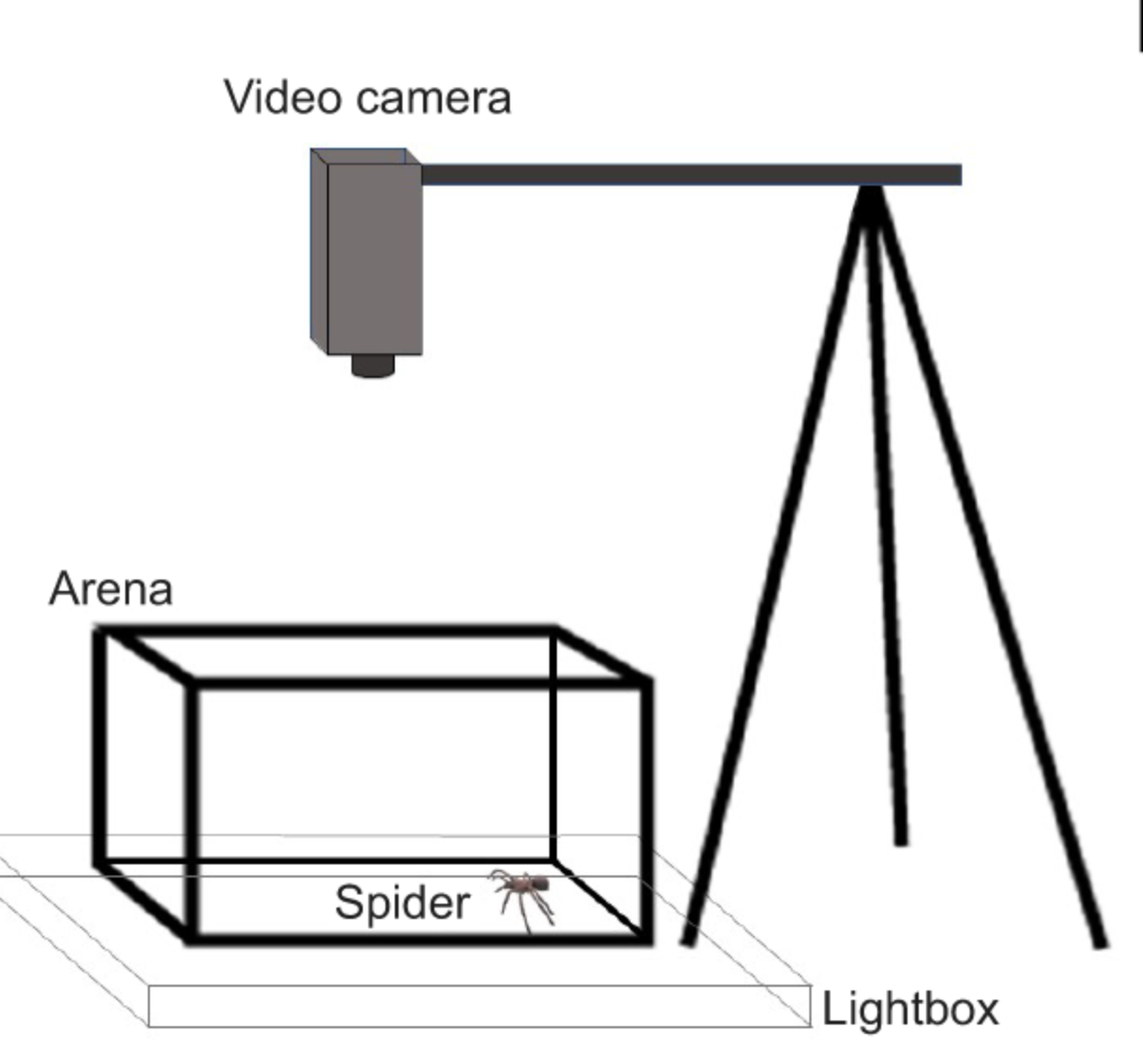
使用高速相机拍摄断腿狼蛛运动(图片来源:参考文献[1])
结果令人意外。蜘蛛几乎在断腿后的第一天就恢复了与断腿前相当的奔跑速度,奔跑路线的直线度几乎没有变化,步频和步幅也基本保持一致。也就是说,它们在失去四分之一的腿部功能后,几乎立刻就能恢复稳定、高效的运动状态。
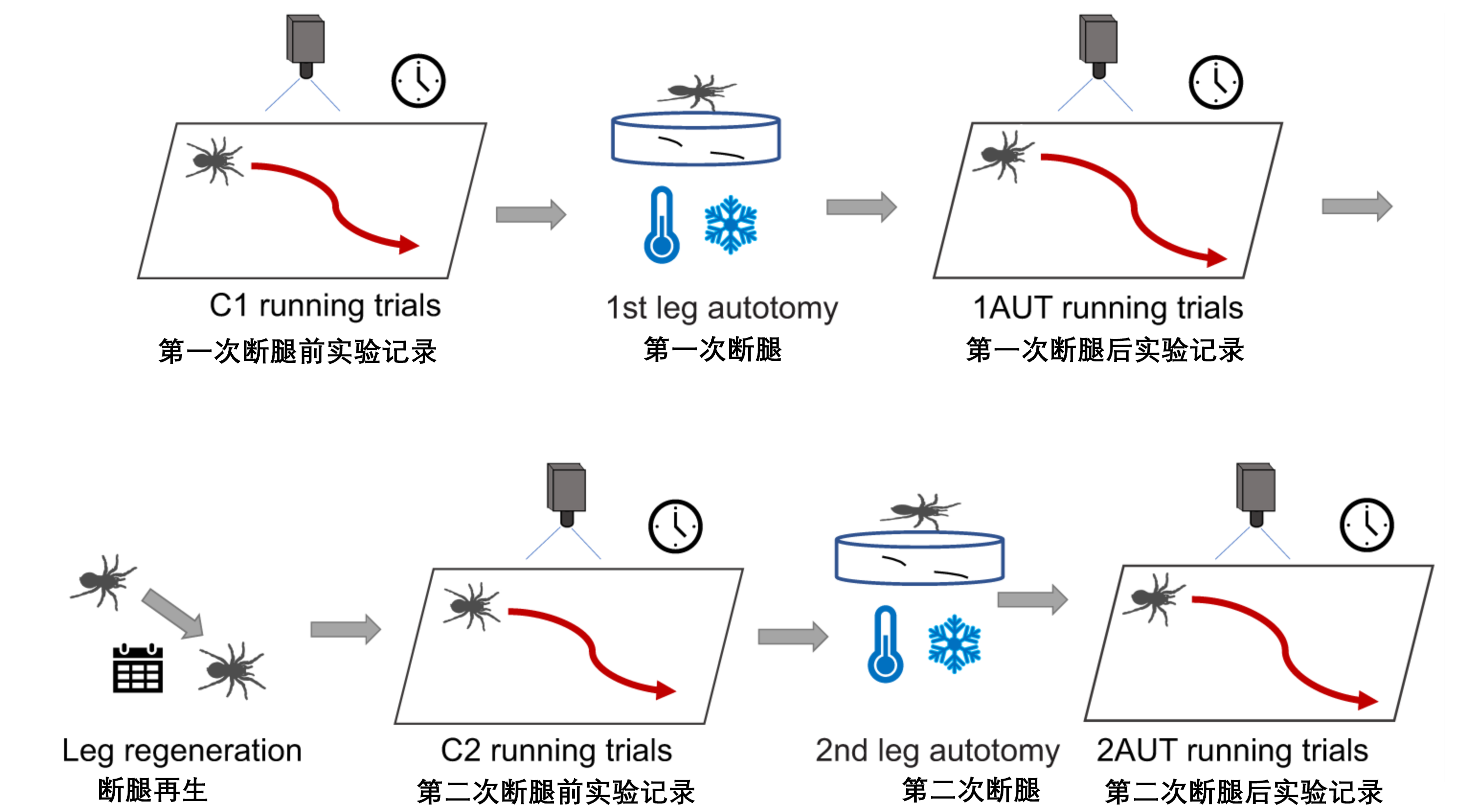
整个实验流程(图片来源:参考文献[1])
更深入的分析显示,这种恢复并不是通过学习完成的,而是蜘蛛在瞬间就启动了备用的运动策略。这种行为在动物行为学中被称为“鲁棒性运动控制”,即动物并不依赖逐步的经验积累或训练来适应变化,而是能够通过神经系统的内在机制迅速调整步态,实现功能上的无缝衔接。
研究团队通过机器视觉系统对蜘蛛的身体姿态、腿部角度、质心稳定性等参数进行了精细建模,发现蜘蛛会通过拉大剩余腿之间的夹角、调整身体旋转角度、改变支撑脚的位置和数量等方式,主动补偿丧失的肢体功能。其中,它们更倾向于保留和使用第四后足作为推动主力,而不是平均分担功能,这种分工在断肢后更加明显。
蜘蛛的混合步态策略
在常规印象中,蜘蛛的八条腿以对称交替的方式奔跑,像机械装置般协调精确。但这项研究发现,当蜘蛛损失两条腿时,它们并不会选择一种固定替代步态,而是展现出灵活多变的混合使用策略——就像会跳不同舞步的舞者,视情况灵活切换。
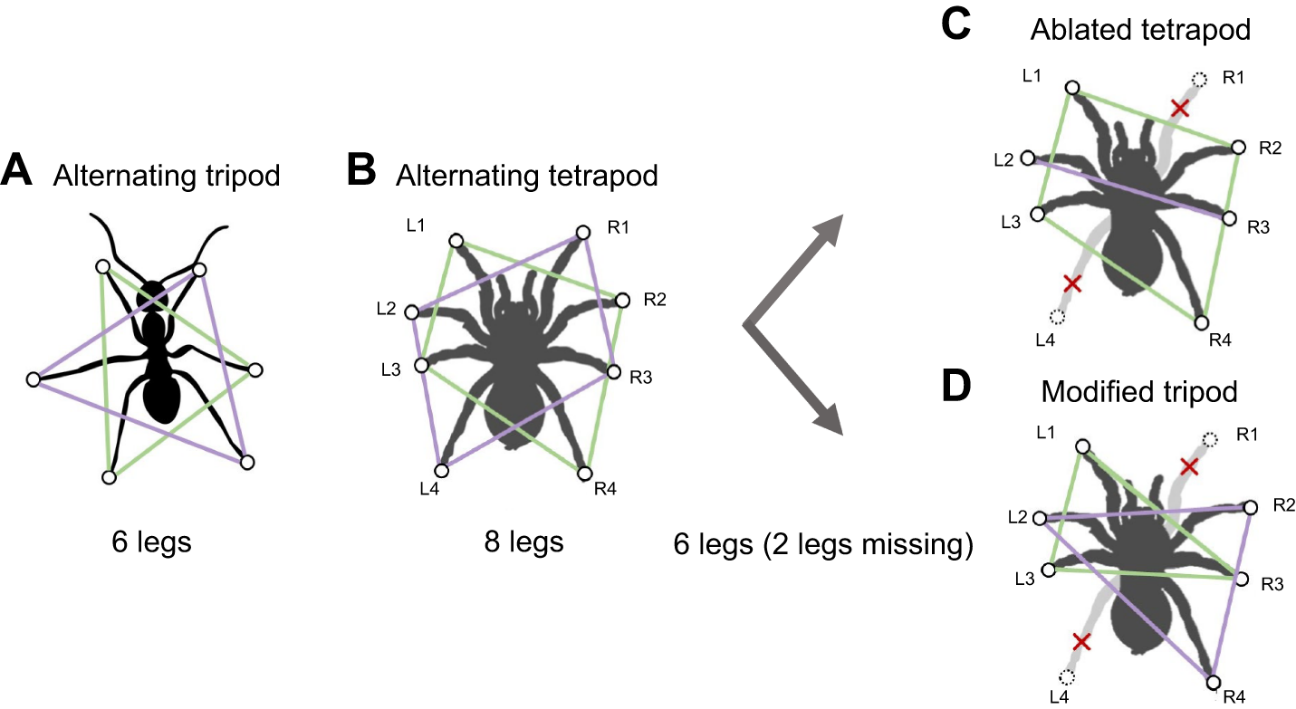
六足动物(昆虫)和八足动物(蜘蛛)的典型步态图解
在腿部完整时,狼蛛通常采用所谓“交错四足步态”,也就是每次有对角四条腿同时着地,形成两个对称的支撑组,以保持身体稳定。而在断去右前腿和左后腿后,这种对称性被打破,蜘蛛面临严重的“运动平衡挑战”。
理论上,它们可以选择两种替代策略之一。一种是“残缺四足步态”(ablated tetrapod gait),即保持一组完整的四腿交替步态,而缺失的两条腿由其余两腿组成一个“不稳定二足支撑”。另一种是“变形三足步态”(modified tripod gait),模仿六足昆虫的三足交替步态。
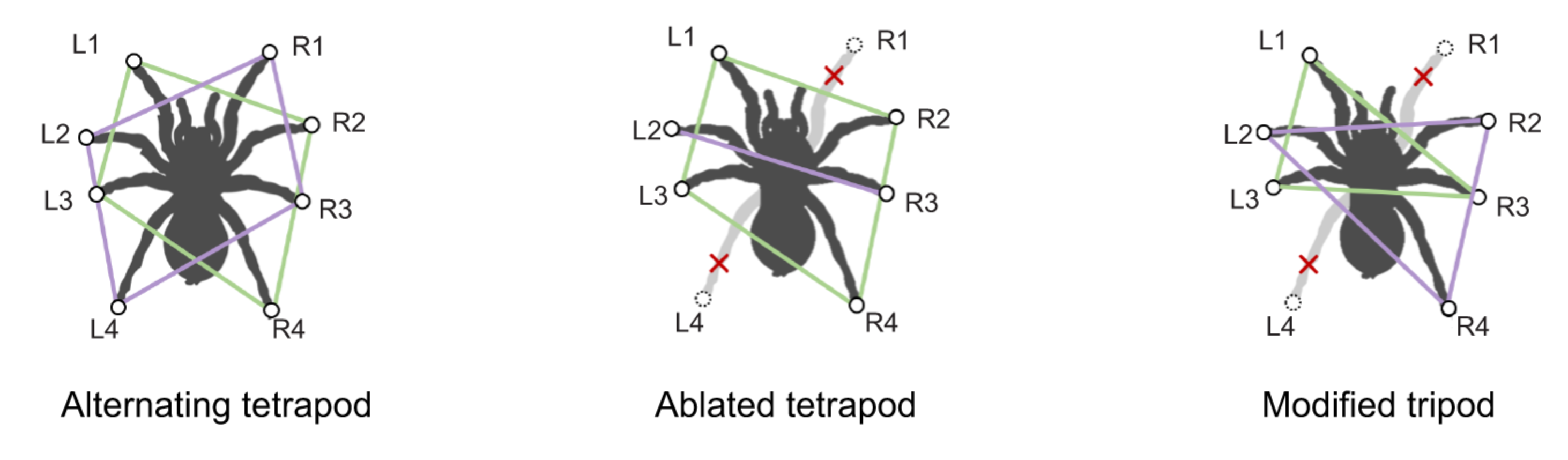
完整的蜘蛛步态与断掉两只腿后蜘蛛的两种步态(图片来源:参考文献[1])
但实际上,研究团队通过高达4.3万帧、800多个步态周期的分析发现,蜘蛛并不固定使用某一种,而是在奔跑过程中动态交替这两种甚至更多混合形态。有时,它们如蚂蚁般三足奔跑,有时却像跛行者用两足前行,甚至会出现只用一条腿短暂支撑的单腿瞬间。蜘蛛似乎在每一步都在做出不同的调整,以适应身体缺陷与运动需求。
为了系统量化这些复杂步态,研究团队使用了一种前沿的分析方法,无监督机器学习聚类。他们将每条腿在奔跑过程中的腿与腿之间运动的时间差映射到一个名为步态空间的高维数据模型中,通过计算步态距离来量化各种奔跑模式之间的差异。
结果显示,即使是在相同的断肢状态下,不同个体、甚至同一只蜘蛛在不同时间也会启用多种步态簇群来奔跑。尤其在失去两条腿的情况下,蜘蛛会更多地采用一种混合三足步态,这种步态在保持奔跑速度的同时还能提升稳定性。而在另一类步态中,蜘蛛会短暂进入“残缺四足”模式,但可能伴随着较差的身体平衡指标,如支撑多边形偏移、稳定裕度下降等。
总结
对许多动物来说,失去一条腿可能意味着行动受限甚至丧命,但对蜘蛛而言,它们不仅能主动断腿以逃生,还能在失去四分之一肢体的情况下,迅速恢复高效奔跑。这项研究揭示,蜘蛛并不会学习新的走路方式,而是拥有内建的步态切换机制,残缺状态下灵活切换不同模式,甚至在奔跑中实时混合使用。
这些观察结果不仅挑战了我们对动物“学习-适应”模式的传统看法,更为“可损伤容错型机器人”“软体结构运动规划”等领域提供了全新的生物启示,复杂运动不必依赖庞大的计算,只要拥有一套灵活混合使用的策略,即使残缺也能高效。
参考文献:
[1] Kane, Suzanne Amador, et al. "Unsupervised learning reveals rapid gait adaptation after leg loss and regrowth in spiders." Journal of Experimental Biology 228.12 (2025): jeb250243.
[2] Apontes, Pasha, and Christopher A. Brown. "Between-sex variation in running speed and a potential cost of leg autotomy in the wolf spider Pirata sedentarius." The American midland naturalist 154.1 (2005): 115-125.
[3] Brown, Christopher A., and Daniel R. Formanowicz Jr. "The effect of leg autotomy on terrestrial and aquatic locomotion in the wolf spider Pardosa valens (Araneae: Lycosidae)." The Journal of Arachnology 40.2 (2012): 234-239.
[4] Brueseke, Michael A., et al. "Leg autotomy in the wolf spider Pardosa milvina: a common phenomenon with few apparent costs." The American Midland Naturalist 146.1 (2001): 153-160.
[5] Full, Robert J., and Michael S. Tu. "Mechanics of a rapid running insect: two-, four-and six-legged locomotion." Journal of Experimental Biology 156.1 (1991): 215-231.
本片为科普中国·创作培育计划扶持作品
出品丨中国科协科普部
监制丨中国科学技术出版社有限公司、北京中科星河文化传媒有限公司
作者丨Denovo科普团队(杨超 博士、中国科普作家协会会员、广东省青年科技创新研究会会员)
来源: 科普中国创作培育计划
内容资源由项目单位提供
