
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科普中国创作培育计划
科普中国创作培育计划 
想象一下这样的场景,一场突如其来的地震过后,楼体垮塌、通信中断,传统搜救设备难以进入瓦砾缝隙,时间在滴答流逝。而就在这片碎石与灰尘之间,一只约3厘米长、身背微型电子背包的黑色甲虫,悄然钻进了一个人类机械所无法企及的角落。它不是普通昆虫,而是一种被赋予远程导航能力的“赛博甲虫”(ZoBorg),一种人类与自然协作而成的微型生命机器人。

甲虫机器人灾后搜救示意图(图片来源:作者使用AI生成)
这听起来像是科幻小说的桥段,但实际上,这是2025年澳大利亚昆士兰大学、澳大利亚新南威尔士大学与新加坡南洋理工大学联合开发的一项真实研究成果。通过精准的神经电刺激,这些甲虫可以被遥控前进、转向,甚至垂直攀爬墙壁。科学家们希望,有朝一日它们能在灾难现场充当“先遣兵”,进入瓦砾缝隙中寻找生命迹象,为救援争取宝贵时间。
为什么我们选择操控一只甲虫,而不是造一台机器人?
在面对废墟、瓦砾、高低不平的灾后环境时,我们自然会联想到“搜救机器人”这个概念。但现实中的机器人,尤其是在昆虫大小这个尺度上,面临着众多工程学难题,它们需要自带肌肉系统的执行器,也需要类似神经系统的传感器与控制电路,以及强大的能源与结构设计来支持灵活运动。做得越小,这些挑战就越难克服。
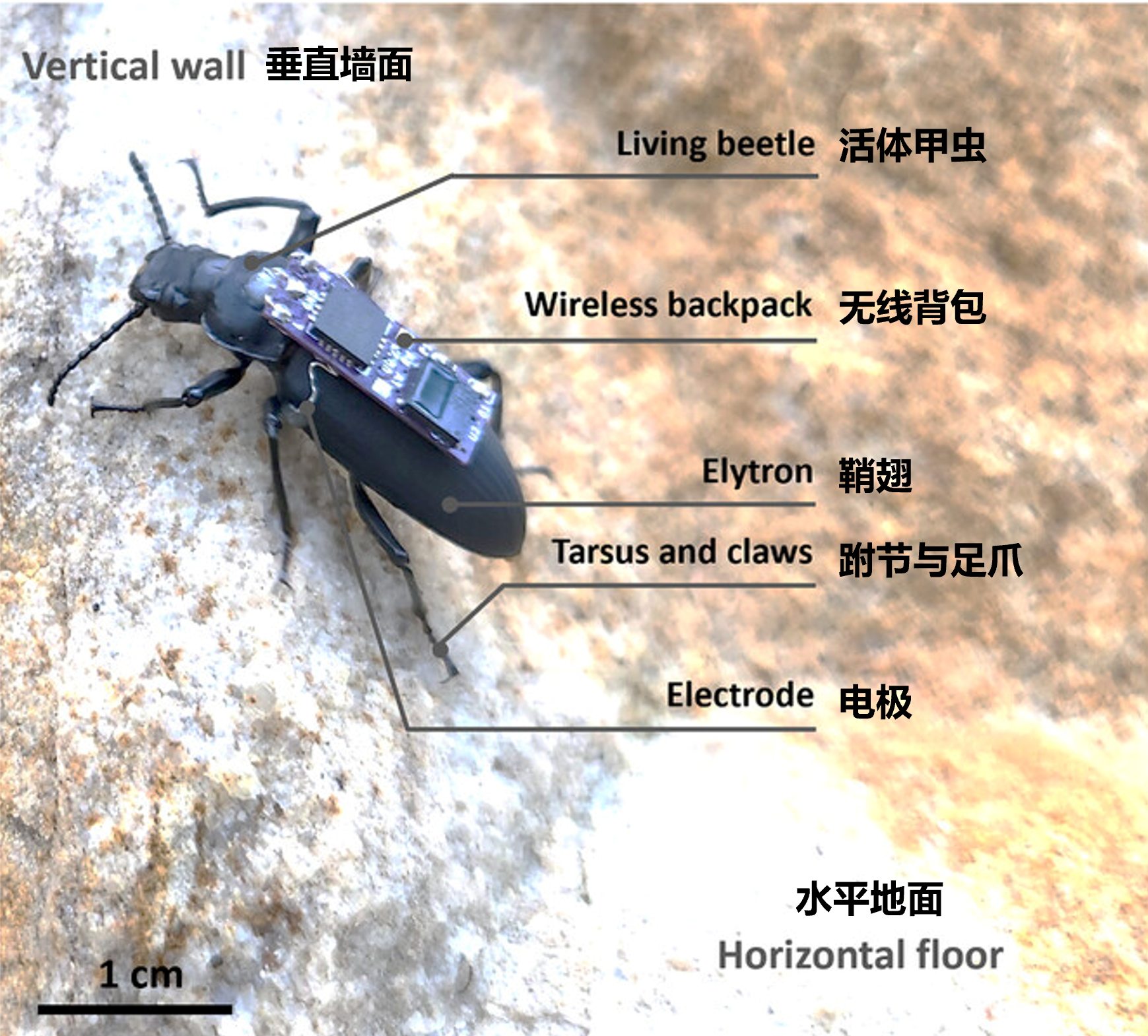
而一只真实的昆虫,已经天然具备了这一切。ZoBorg计划选择的是一种名为Zophobas morio 的黑腹果甲虫(俗称“超级虫”)——这种昆虫的成虫体长约 3 厘米,高度约 8 毫米,小巧、灵活,而且天生就擅长攀爬。这些甲虫拥有进化数亿年的生物机体,包括带有微小吸附垫与利爪的足部结构、能感知墙面纹理与方向变化的触角,以及无需电池即可运作的高效肌肉动力系统。
ZoBorg机器人甲虫(图片来源:参考文献[1])
研究人员并不是要替代这些复杂精妙的结构,而是以最小干预的方式,为其加装控制装置。他们设计了一种微型背包,内含红外接收器与微处理芯片,并向甲虫的鞘翅或触角植入电极,通过电刺激诱导特定运动指令。例如,刺激左侧鞘翅,甲虫就会向右侧横向移动;同时刺激双翅,则会加速前行;而通过刺激触角,还能诱导后退或转向等行为。
换句话说,ZoBorg 并不是一台从零搭建的机器人,而是一个 “活体机器虫平台”,人类只需“接管方向盘”,而驾驶的,是一位天然就熟练穿越复杂地形的老司机。
控制Zoborg跨越5毫米台阶(图片来源:参考文献[1])
与传统机器人相比,这种“借助昆虫”的方式具有诸多优势:
极低能耗,昆虫自己就能运动,不需电机驱动;
高适应性:能爬墙、越障、钻缝隙;
结构成熟:无需设计传感器、控制器和执行机构;
成本低廉:一只甲虫远比一台微型机器人来得经济。
赛博甲虫能力到底有多强
比起跨过一个小障碍,“从地面转身垂直爬墙”,对于任何一个机器人而言都是一道难关。这不仅涉及重力挑战、身体姿态调整,还要求足够的附着力和复杂的感知判断。而ZoBorg的最大突破,正是在这方面展现出惊人的能力。
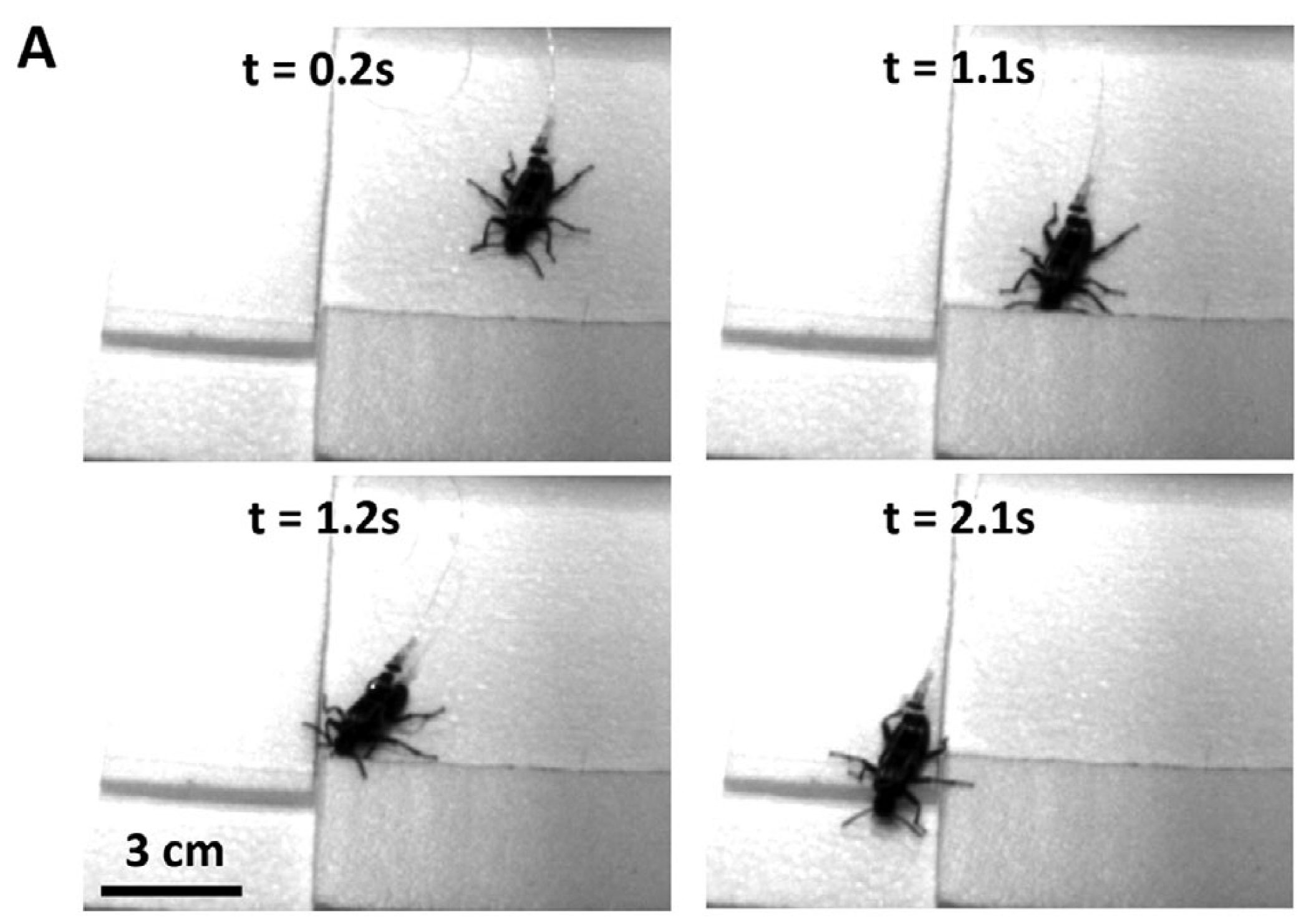
研究团队设计了一种 “按需登墙”方案,让甲虫在接触到垂直墙面时,可以在指令引导下主动攀爬。整个过程分为三个阶段:
首先当ZoBorg靠近墙体时,电刺激让其加速并以特定角度接触墙面。甲虫的触角和脚部感应器会判断前方的“障碍”是否可以攀爬。如果未能立即攀爬,系统会继续刺激其远离墙的一侧翅鞘,使其身体横向转动,与墙面平行。接下来,通过反复电刺激诱导其横向运动,促使其从地面“侧身”切换到垂直墙面,完成完整转场。

控制Zoborg爬墙实验(图片来源:参考文献[1])
这样的机制,模拟了自然中昆虫寻找路径的行为,它们本能地倾向于向“阻力更小”的方向移动,而垂直墙面,在某些角度下反而成为这种路径。
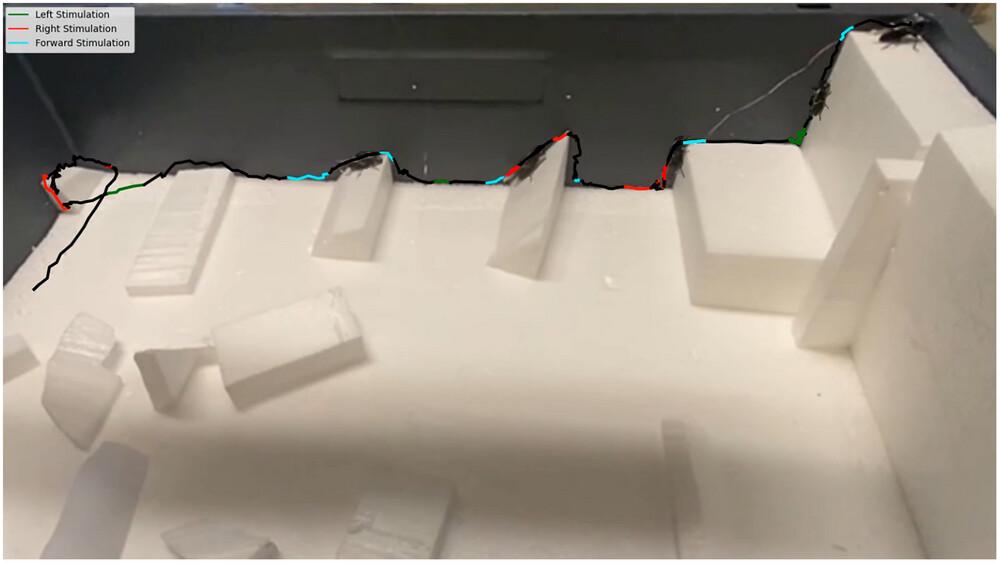
实验结果令人瞩目,在5毫米和8毫米的障碍高度下,ZoBorg跨越成功率超过92%,耗时通常不到1秒。而在垂直登墙实验中,ZoBorg的总体成功率为71.2%,其中68%是沿墙行进后“转角登墙”,32%是在墙面中部直接完成攀爬。即使是实验后5天再重复,ZoBorg的登墙表现依然维持在76%以上,显示出良好的稳定性与生物适应性。
Zoborg 被控制着在复杂地形上穿越(图片来源:参考文献[1])
更值得一提的是,ZoBorg背负了一个重达自身近一倍的小型电子背包,依然能够完成墙面攀爬,并在室外粗糙石墙表面实现自由移动,这一点,许多微型机器人至今都难以企及。
总结
或许你不会想到,未来某个灾难现场,首先钻进废墟缝隙中寻找生命迹象的,不是一台机器人,而是一只甲虫ZoBorg 的出现,不只是一次技术突破,更是人与自然联手作战的真实写照。它不靠钢铁驱动,却能凭借进化出的感知能力、灵巧肢体,加上微电子刺激,在复杂地形中灵活穿梭、垂直爬墙。
这种“生物-人工”协同策略,不仅仅提升了爬墙能力,更启发了科学家们对下一代仿生机器人设计的全新想象。
参考文献:
[1] Fitzgerald, Lachlan, et al. "Zoborg: On‐Demand Climbing Control for Cyborg Beetles." Advanced Science (2025): e02095.
作者丨Denovo科普团队(杨超 博士、中国科普作家协会会员、广东省青年科技创新研究会会员)
审核丨殷海生 中国科学院分子植物科学卓越创新中心,上海昆虫博物馆馆长/研究员级高级工程师
来源: 科普中国创作培育计划
内容资源由项目单位提供
