
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 重庆市科学技术协会
重庆市科学技术协会 
当你听说“人形机器人跑马拉松”时,是不是觉得又酷又有点“脑洞大开”?4月19日,北京亦庄全球首个人形机器人半程马拉松开跑。一群钢铁侠般的机器人,穿着“金属鞋”,在赛道上一步一步“慢悠悠”地前进,背后却是一队紧张兢兢业业的工程师团队。今天,我们就来揭秘它们如何“坚持到底”,一探那些让机器人“跑”起来的黑科技!
一、为什么要让机器人跑马拉松?
人形机器人跑半程马拉松(约21公里)并非炫技,而是一次“极限体能”大考验。在实验室里,我们可以给机器人铺平地、调恒温、插电源;可现实赛道上,地面高低不平、灰尘飞扬、信号干扰,一切都无法模拟。只有在真正的长距离赛跑中,才能暴露出关节结构、电池续航、散热能力和运动算法等“隐藏Bug”。
二、“机器人腿”有哪些秘密武器?
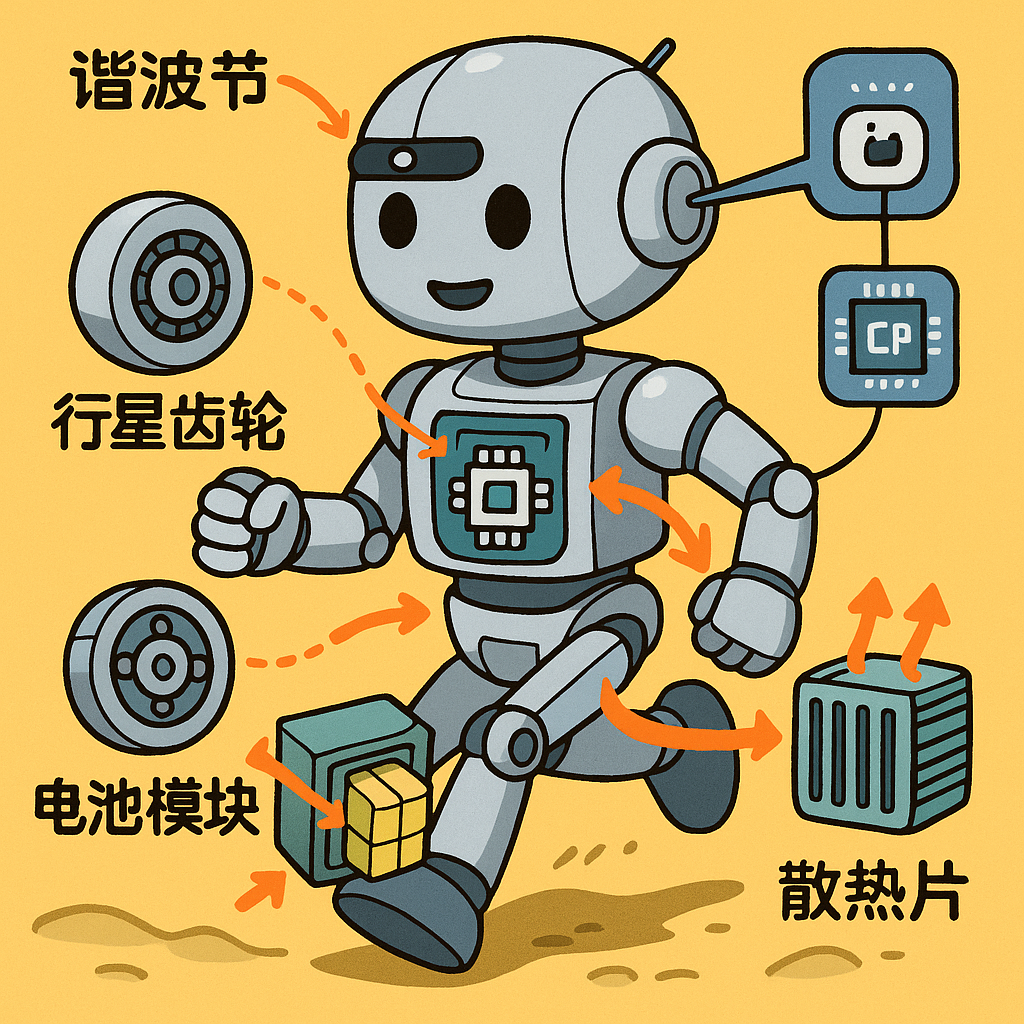
要让机器人迈出脚步,关键在“膝盖”和“脚踝”——也就是减速器(齿轮组)。目前主流有三种减速器方案:
谐波关节:就像摩天轮上的齿轮,虽然转得不快,但输出扭矩大、运行安静,还能持续跑一两个小时不“偷懒”。
行星齿轮:效率高、响应快,常见于表演型小机器人,能做“鲤鱼打挺”这样的炫酷动作。
直线关节(行星滚柱丝杠):结构更紧凑,但对精度要求极高,适合高精度动作。
打个比方:这些关节就像你骑自行车时的档位,不同“挡位”下踩踏的感觉完全不同。
三、“热身”和“喘息”——散热与电池换人
高强度奔跑容易发热。机器人电机运转时就像给它“吃”了大力丸,内部温度飙升,得靠“散热”来降温。目前,大家多依赖金属外壳被动散热,再辅以改良电机绕线和增强导热结构,尽量把热量“赶走”。
电池就像机器人“能量槽”,跑一会儿就要“吃点补给”。赛事中每隔3公里设补给站,可实现“热插拔”——在不关机的情况下几秒钟完成电池更换,让机器人继续“吃瓜”前进。
四、“眼耳口鼻”——感知与算法的巧妙配合
在“跟跑”模式里,机器人通过贴在领跑员身上的二维码,用摄像头“盯”着跑步目标,实时调整步伐;若是全自主模式,还需要自己“看”赛道、“算”路线、“选”步态。想象一下,地上有小石子、减速带、甚至突发风吹草动,机器人必须在千分之一秒内做出判断,否则就会“扑街”。
这背后靠的就是“控制算法”——把关节、传感器和控制芯片联结成闭环,让机器人像“装了大脑”般自我平衡、自主走路。
五、“金属疲劳”与“通信干扰”双重挑战
长时间重复运动,就像你一天不停跳绳,肌肉会酸痛;机器人金属结构也会“金属疲劳”,出现松动或开裂。因此,设计师要选用高强度材料、优化结构布局,降低疲劳风险。
与此同时,现场几十台机器人蜂拥而过,无线信号易互相“吵架”。一旦通信受干扰,控制命令可能来不及到达,机器人就会“跟丢人”——变成“呆瓜”。于是各家纷纷优化通信协议,避开高峰频段,保证“通话”清晰。
六、幕后英雄——工程师团队的“马不离鞍”
别以为机器人自己能跑,现场有二三十位工程师一路“殷勤陪跑”,负责算法调试、电池更换、故障排查……就像给机器人配了豪华后援团。赛道旁还有“医疗车”——装满备用电池和工具的后勤车辆,随时待命。
七、小结:跑马拉松,不只是“跑”
人形机器人马拉松赛,不只是比谁跑得快,而是一次系统级“体检”:关节的耐久度、散热的效率、能量管理的成熟度、算法的鲁棒性和通信的可靠性……每一步都凝聚了工程师的智慧。等到这些基础能力都“跑”过来,未来的巡检、配送、安防等场景里,机器人就能真正“上场”啦!
下次想像自己的机器人,是否也能像这样跑得稳当、跑得久、跑得安全?快把这些秘密武器记在心里,说不定哪天,你也能成为给机器人调校“跑姿”的小工程师哦!
供稿单位:重庆市无线电科普体验中心
审核专家:杨耀辉
声明:除原创内容及特别说明之外,部分图片来源网络,非商业用途,仅作为科普传播素材,版权归原作者所有,若有侵权,请联系删除。

来源: 重庆市科学技术协会
内容资源由项目单位提供
