
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 2024年度科普中国资源荟萃集成示范项目
2024年度科普中国资源荟萃集成示范项目 3.2 陆地上靠导航开车,海上也能靠导航开船吗?
生在这个时代的路盲是幸运的,有各种导航软件带你在复杂的城市里穿梭。那开船呢?航海也能依靠导航吗?
当然能。
事实上,导航的英文Navigation,源自拉丁文Navigare(navis表示船,agere表示指引),原意就是“引导船舶航行”。在现代,这种引导是指利用工具确定地球的经度和纬度从而确定船只的航线。
人类从新石器时代晚期就开始导航了。我们需要知道方向,知道目的地在哪里,才能把握自己的命运。商业的利益和征服的欲望,推动了人类文明,也一直是导航技术发展的原动力——
不夸张地说,导航发展史就是人类文明发展史的写照。
地文导航:地上灯塔在召唤
在古代,人们往往选择沿着岸边航行,除了船只补给和安全的考虑,还有重要的一点就是,可以通过山头、岛屿、海岸、特殊物标等陆标测算及航迹推算推断来获取自身船位。
一直到中世纪鼎盛时期,地中海的商船大多还是沿岸航行。来自西北欧的商船在通过直布罗陀海峡(位于西班牙最南部和非洲西北部之间)后,不会向东直航,而是在地中海沿岸的西班牙、法国、意大利等地海岸迂回航行。
那时候,如果在海上看不到陆地,尤其是天气情况不好的时候,人们很难确定船位及方向。迪亚士、达伽马等航海家在探索新航路时也往往选择沿着岸边航行以保证船队安全并相对准确地记录航线——这种通过观测陆地标识来进行定位导航的技术称为地文导航,也叫陆标定位,是一种古老而非常有效的导航技术。
地文导航技术运用的标志——灯塔很早就已出现。早在公元前280年在埃及亚历山大港就已建造了高达60多米的灯塔。明代茅元仪所著《武备志》记载的《郑和航海图》,自南京绘图,直至东非沿岸,航图遍及广大西太平洋与印度洋海岸地区,记载了500多个地名,并绘有航路、各处星位高低以及航行途中的山峰、岛屿、浅滩、礁岩、险峡,这显示了明代利用地理物标辅助船舶导航技术已经相当成熟。
陆标导航是中国航海历史中的明灯,是山,是塔,是航行在茫茫大海中的希望。古时候,海岸边的高山名塔,除了是城市的地标外,也为海上船只设立了明显的导航标志。
天文导航:星星指引方向
要驶向遥远广阔的海洋,必须离开陆地。茫茫大海中,没有参照物的情况下,怎么知道自己身在何处?
陆地上没有可以观测的,就可以看看天上的天体。日月星辰这些天体虽然随时都在运行,但它们都有客观规律可循,自公元前1800年的巴比伦星表开始不断发展至此,我们已经可以掌握大部分天体在天球上的运动规律和所处位置。我们可以根据自己相对于天体的位置推算出自己所在何处。水手出身的英国诗人约翰·梅斯菲尔德(John Masefield)曾写下这样的诗句:“我必须再次回到大海,回到那孤寂的水天一方,我想乘上一艘高大的航船,让星星为我指引方向。”
中国是世界上天文学发展最早的国家之一,很早之前,我们的祖先就懂得用天体来导航了。
公元前100年,《淮南子·齐俗训》记载:“夫乘舟而惑者,不知东西,见斗极则寤矣。”斗就是北斗星,也就是在海上迷路的时候,看看北斗星就知道方向了。公元400年左右,东晋僧人法显在《佛国记》中写道:“大海弥漫无边,不识东西,唯望日月星宿而进。”
到了公元1000年左右,宋代朱彧在《萍洲可谈》中写道:“舟师识地理,夜则观星,昼则观日,阴晦观指南针。”可见,靠观星知方向的1000多年后,人们在阴天用上了指南针。这也是世界航海史上最早使用指南针的记载,说明当时中国的航海技术站在了世界的最前列。
明代,郑和使用“过洋牵星术”七下西洋,使用牵星板来对照测量北极星等天体高度来确定位置,这是把肉眼观星技术化,也造就了世界航海史上的伟大壮举,是我国航海技术发展的巅峰时期之一。
明朝后期到清朝,受到腐败政府闭关自守、“严励海禁”的限制,我国的航海事业一蹶不振,逐渐退出了世界航海舞台。不过,放眼世界范围,由于15世纪欧洲资本主义的兴起,航海事业也应运而兴,天文航海在西方得到进一步的发展。
1759年,英国钟表匠哈里森(John Harrison)制成第四代航海天文钟,成功地解决了海上经度的测量问题。1837年,美国船长萨姆纳(Thomas Sumner)在航海实践中发现了天文舰位圆(测出某具体天体的天顶距,以星下点为圆心,天顶距为半径的圆叫做天文舰位圆)的概念,1875年,法国航海家圣西勒(St. Hilaire)提出“高度差法”,从而实现通过观测天体,同时解算出观测者经纬度,天文定位进一步得到了广泛的应用。
用于观测天体高度角的仪器很多,也经历过漫长的发展,诸如郑和船队的“牵星板”,阿拉伯人15世纪前后的使用的“拉线板”等等。这些由不同民族在不同时期发明的仪器,都显示了航海先行者们的不懈探索与高度智慧。
后来,测量天体的设备又发展为精度更高的八分仪,以及后期的六分仪。现在,六分仪也是每艘船上必备的航海仪器。

本书编著者张志友(左)在郑和舰上为学员讲解六分仪使用方法
天文航海定位的手段有很多种,比如观测太阳上中天高度测纬度、两次观测太阳获取经纬度、同时观测多颗星获取经纬度等等,另外北半球可以观测北极星获取纬度。
每种定位手段的原理有所不同。
比如说,如何在北半球观测北极星获得我们所处的纬度?
你可以想象下:当你站在地球上抬头看天,把地球以外的视野部分无限拓展,形成一个无限大的大球,然后将所有天体投影到大球上——
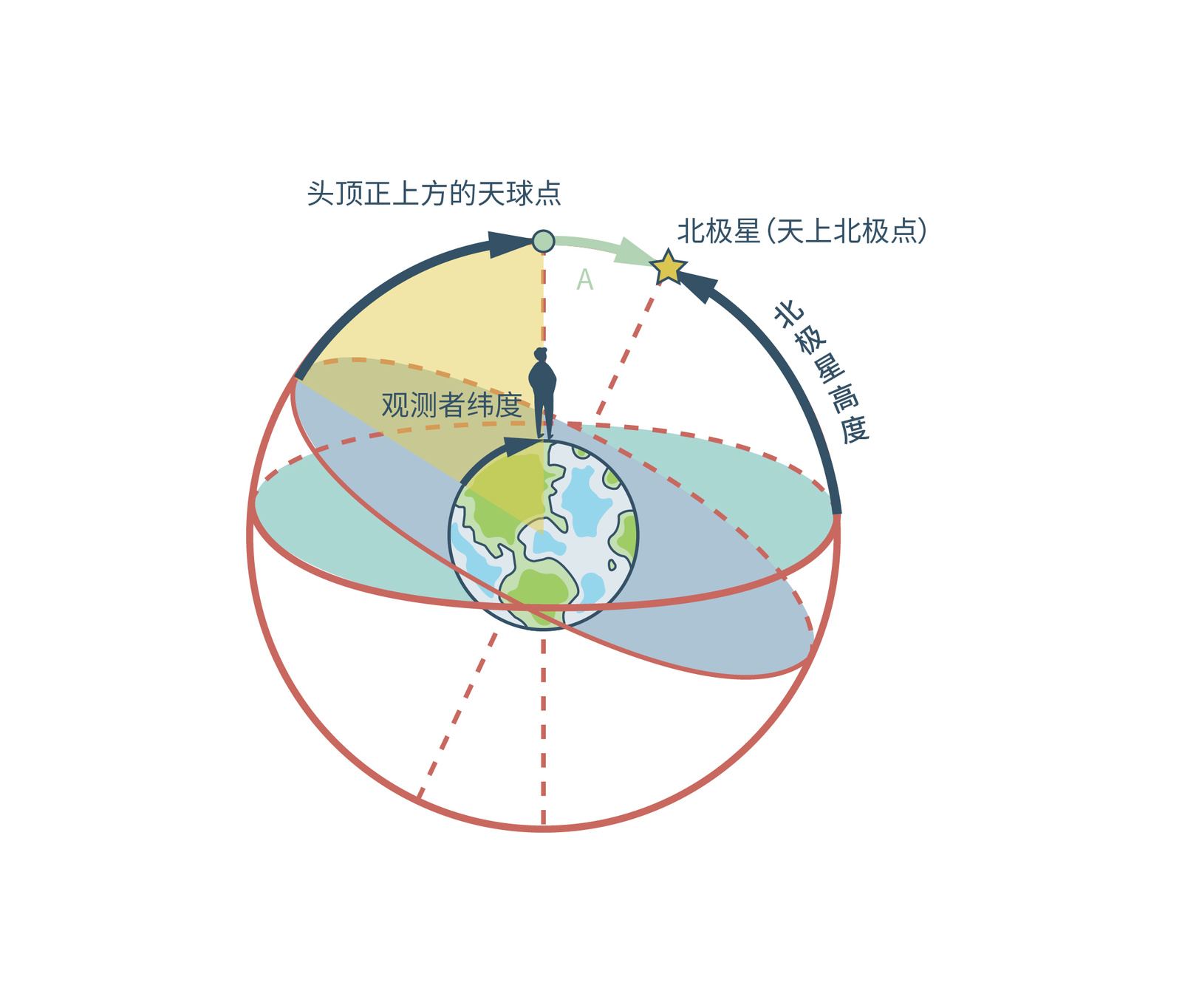
如上图所示,这时,你所站的地球就变成了大球中心的一个小点,而北极星就在天上的北极点。这时,你、你头顶的正上方和北极点会形成一个夹角A,而北极星的高度角(测量者地面和北极星所夹的角度)和A相加为90°,观测者的纬度(测量者头顶和赤道面所夹的角度)和A相加也是90°。所以北极星的高度和观测者的纬度相同,因此只要得到北极星的高度角便可获知纬度。
测量经度的方法就比较容易了:地球一圈360°对应24小时,那么平均1小时就对应15°。所以,当船出发时,携带一台显示0°经线(本初子午线)时间的天文钟,每当船到达一个新地方,当地太阳上到最高点的真太阳时都应是12点,假设此时天文钟的时间显示的却是11点,那么当地与0°经线的时间相差一小时,经度差就是15°,东边的太阳先升起,所以当地比0°经线更偏东,从而获知所在地经度为东经15°。
相比于分别获取经度和纬度,观测多个天体直接获取经纬度要更直接些:简单说,就是利用已知的天体的位置来确定未知的地球上观测者的位置。
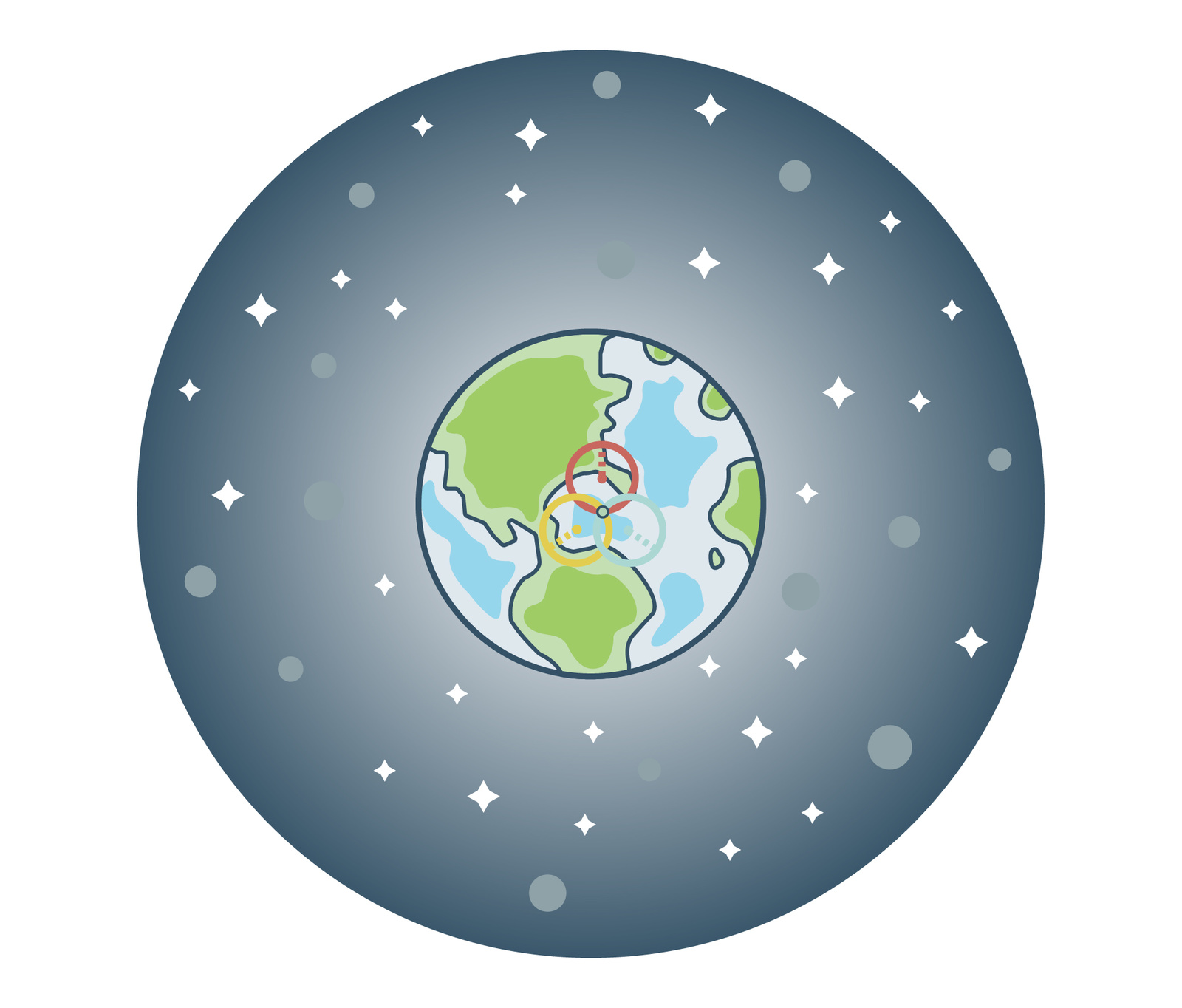
如上图所示,因为我们已经掌握大部分天体在不同时间点在天球上所处的位置,可以使用六分仪等测角仪器对天体的高度角进行观测,从而建立起地球上测者和天体间的位置关系,最后以观测天体为中心,以观测数据为半径,在天球上画一个圆,当观测两颗星、三颗星就可以获得两个圆、三个圆,他们的交点在地球上的投影就是观测者在地球上所处的位置。
当然,以上都是传统的天文定位导航的手段。天文导航的应用,会受到很多自然条件的限制。比如遇到阴雨、云雾天气时,使用六分仪就无法清晰地观测到天体(不管是太阳还是北极星),而且在夜晚难以看清水天线,所以观测时机有限。
所以,这种导航方式并不稳定,加之观测数据的计算处理非常复杂,后来逐渐被其他方法取代,尤其是现在有了卫星导航技术,天文导航就弱化成一种备用方法了。
但是,作为一种古老而持久的导航技术,天文导航的好处在于它是一种独立的测量定位技术,可以进行实时测量,而且导航误差不会像惯性导航那样随时间累积,所以适合在舰船上长时间自主运行。尤其是在现代信息化对抗中,以卫星导航为主的各种无线电导航系统很容易受到干扰,而观星则不需要其他技术的配合,不被电磁干扰,自有其方便之处。
现在,随着设备更新,六分仪从用肉眼观测升级成了“电子眼”,可以观测到肉眼看不到的天体并进行电子化计算,观测效果如虎添翼,还可以实现全自动、全天候、全地域的电子天文定位,现在,这种系统已经逐渐安装在新型舰船上,保障舰船即便受到电磁干扰,也能长时间进行准确的定位导航。
卫星导航:天上卫星来指路
技术进步给我们带来了卫星导航。采用导航卫星对地面、海洋、空中和空间用户进行导航定位,就是卫星导航。
当前,全球主要卫星导航系统有如下几种:俄罗斯的格洛纳斯(GLONASS),欧洲的伽利略(Galileo satellite navigation system),美国的GPS(Global Positioning System,全球定位系统)以及中国的北斗。
各类型的卫星导航系统都经历了不寻常的发展历程:
美国于1973年开始研发GPS。从1978年发射第1颗GPS卫星,到1994年完成21颗工作卫星及3颗备用卫星的配置,1995年4月美国国防部正式宣布GPS具备完全工作能力。
格洛纳斯(GLONASS)是苏联在1976年启动的项目,曾遭遇了前苏联解体,俄罗斯经济不景气,但始终没有中断过系统的研制和卫星的发射。终于1996年1月18日实现了全球组网。
欧盟研发的伽利略系统于1999年启动,并于2019年因技术故障导致部分导航服务中断,直至2018年,发射了最后4颗伽利略导航卫星,艰难地实现全球组网。
20世纪80年代,中国开始探索适合国情的卫星导航定位系统发展道路,逐步形成了中国及周边地区——亚太地区——全球的三步走发展策略,2020年7月31日,北斗三号全球卫星导航定位系统正式开通,完成了全面的组网。
导航卫星的定位原理是三角定位法。将空间中的卫星作为已知点,发出测距信号,测量卫星到地面点的距离,然后通过距离来确定接收设备在地球表面或空中的位置。
卫星导航原理主要是基于三角定位原理。卫星定位系统通过测量卫星与接收器之间的距离来确定接收器的位置。这个距离是通过测量卫星信号的传播时间来实现的。
卫星不断地发送包含卫星位置和时间的信号,这些信号被接收器接收并测量其到达时间。由于卫星的位置是已知的,所以接收器可以通过测量其到不同卫星的距离来确定其自身的位置。
要实现这个过程,至少需要接收来自四颗卫星的信号,因为这可以形成一个三维的坐标系和一个时间偏差。通过这种方式,接收器可以确定其在地球上的具体位置。
需要注意的是,卫星导航系统的时间是由卫星上的原子钟保持的,这些原子钟可以提供非常精确的时间测量,从而确保位置测量的准确性。
总的来说,卫星导航系统是一个利用三角定位原理来确定地球上接收器位置的系统。通过测量卫星信号的传播时间和卫星的位置,接收器可以确定其在地球上的位置。
卫星不断发送卫星位置和原子钟时间信息,同时发射测量距离信号。GPS接收机接收卫星传来的信号并确定它到达的时间,所以接收器可以通过公式“时间*速度=距离”,来获得接收机到不同卫星的空间距离。由于卫星的位置是已知的,所以接收机所在的位置就可以得知。
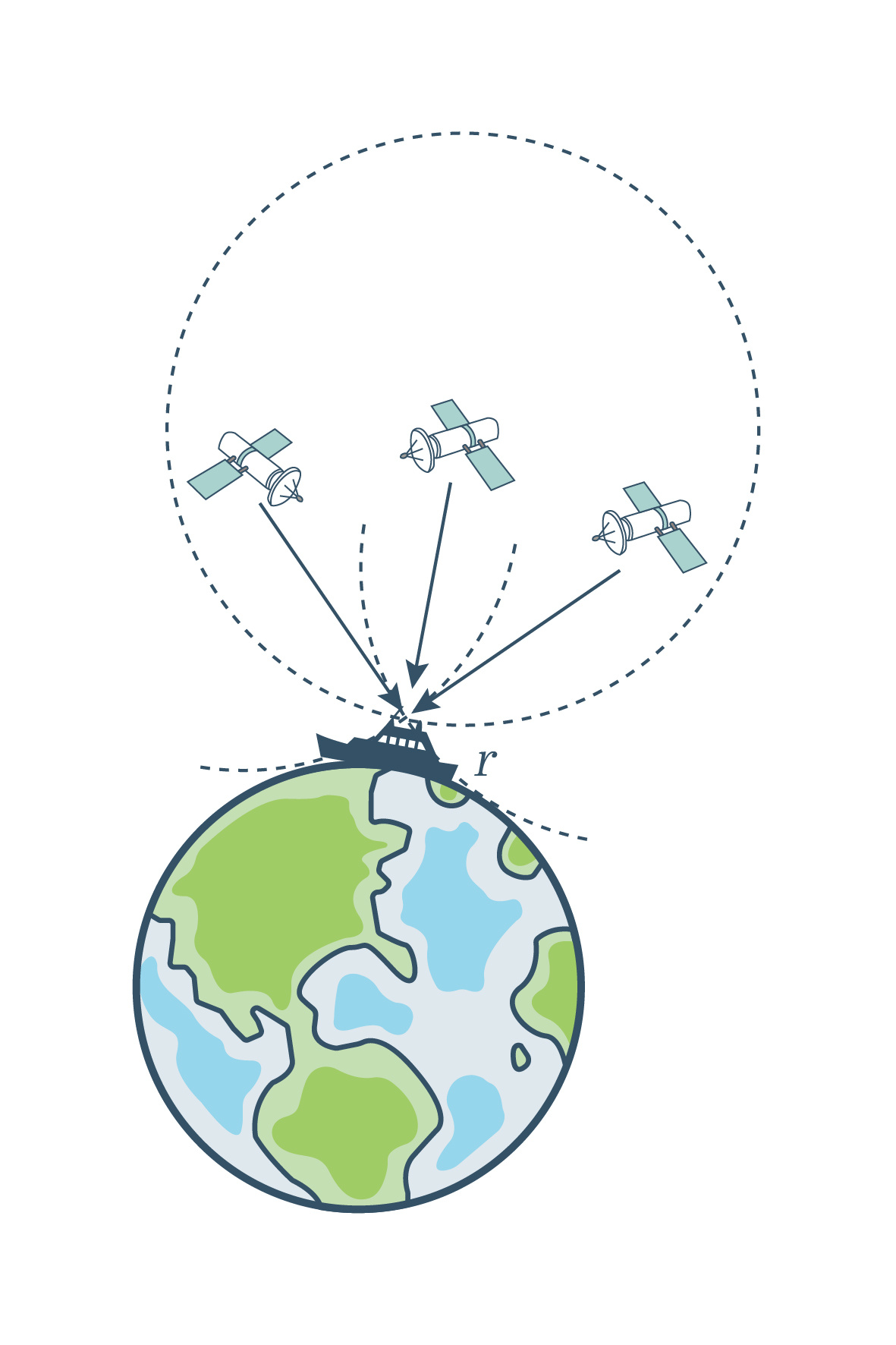
如上图所示,接收机位于以卫星为球心,卫星到接收机空间距离为半径的球面与地球表面相交的圆弧的某一点。为了要获得三维的坐标信息(经度、纬度、海拔高度),所以要同时观测三颗卫星。以此类推,可以根据第二、三颗观测卫星的数据找到另外两条弧线。三条弧相交于在地球表面的那一点(r),就是接收机的位置。
不过,由于大气的干扰和时间同步的误差,测出来的距离也含有一定的误差,我们称这段距离为伪距(可以理解成有误差的距离)。为了消除时间同步误差的影响,接收机需要再多测1颗卫星才能准确定位。通常来说,一个接收器需要随时至少能够和4颗GPS卫星直接联系,才能精确判断自己所处的位置。如果只有3颗卫星,就无法判断海拔高度;如果只有2颗,就无法计算精确位置了。
目前,卫星导航系统已经是航海上主要使用的导航系统,各型船舶都普遍装备了卫星导航。SOLAS公约(《国际海上人命安全公约》)规定:所有船舶,不论其尺度大小,均应设有1台全球导航卫星系统或陆地无线电导航系统的接收机,或其他装置,适合于由自动设备在船舶整个预定航程内随时确定和更新船只。
惯性导航:蒙着眼也能走准
想象一下,你闭上眼睛走路——
当然,并不是胡乱走,而是每一刻都知道自己改变了多少方向和走了多远,比如,往左走了一步,记下来,往右走了一步,又记下来:往左走了两步,又往右走了三步,那么现在的位置就相当于“往右走了一步”。就这样不断地记录,心里默念,把所有的信息加在一起,走一步推算一步,最终你就会知道自己走到了哪里——
这就是惯性导航。
惯性导航使用“惯性器件”来感知,用加速度计测量加速度,陀螺仪测量角速度,通过测得的瞬间变量进行积分,便可推算出每一步的行程变化,将每一步的变化累加到初始数值,就可以得到不同时间里,载体在在导航坐标系里的位置、速度和姿态。

惯性导航最大的优势就是不依赖于外界的信号,自主隐蔽,抗干扰能力强,而且能全天候地、实时获得位置、速度、姿态等多种信息。当然,它的缺点也很明显,就是误差非常容易扩大,就像一枚不准的手表,一天不对表或许能勉强用用,但十年不对表,这个表就没法提供正确时间了。
所以,我们希望尽量可以将惯性导航与其它导航方式结合使用,这样便可兼具抗干扰、速率高和误差有限的优点。
组合导航:一个都不能少
除以上介绍的导航系统外,舰船还有陆基无线电导航系统、雷达导航等等。如此多的导航设备,到底哪个最好,应该优先使用哪个呢?
其实,导航界也一直在研究这个问题。简单说,答案就是:没有最优解,或者说,要根据任务的不同或其他各项因素来综合考虑。
理想的导航系统,要满足很多种要求:全球覆盖、高精度、实时响应、能够提供三维位置、三维速度和航向姿态数据、工作不受外界环境的影响、具有抗人为及非人为干扰的能力、能随时进行故障检测和故障排除、高可靠性、成本低、为广大用户所接受——
这么多的要求,任何单一的导航系统都无法满足。而且,万一现在用的导航设备出了问题怎么办?甚至,每一种设备输出的信息都有一定误差,那怎么能得到更高精度的定位结果?
所以,我们会使用组合导航,利用计算机和数据处理基础,把具有不同特点的导航设备组合在一起,以达到优化的目的。这样可以发挥单一导航设备各自的特点,扬长避短,可以使得导航能力、精度、可靠性和自动化程度都大大提高。就好比——众人拾柴火焰高。
导航技术和基础科学的发展一直相辅相成。数学、地理学、天文学、气象学、海洋学、制图学、无线电技术、计算机技术、卡尔曼滤波技术、卫星技术、微机电技术等方面的进展都会率先在导航领域应用,导航技术也会推动这些领域的技术发展。
人们为了让船舶准确、高效、安全地到达目的地,发明了这么多种船舶导航方式,但对导航技术的探索还远没有结束。
随着人类加快探索海洋和太空世界的步伐,更多崭新的世界在等待我们去发现。我们可以期盼,会有更精准、便捷的导航技术和设备带领我们去往更深远的世界。
来源: 海军大连舰艇学院
内容资源由项目单位提供
