
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科小二
科小二 当今时代科技飞速发展,从智能家居到工业制造,从医疗保健到太空探索,机器人正在以前所未有的速度和规模改变着人们的生活,并真实地走进各行各业。
普遍认知中,“以机械力替代人力劳动”作为人类长期以来孜孜以求的理想,反映了世代人的深切渴望。
机器人与人类的关系到底是什么?技术进步带来的伦理问题将何去何从?人工智能的未来发展又将走向何处?......关于机器人技术的全面影响与潜力探讨,历来是社会各界热议的话题,其热度经久不衰,映射出人类对这一领域的持续关注与深切期待。
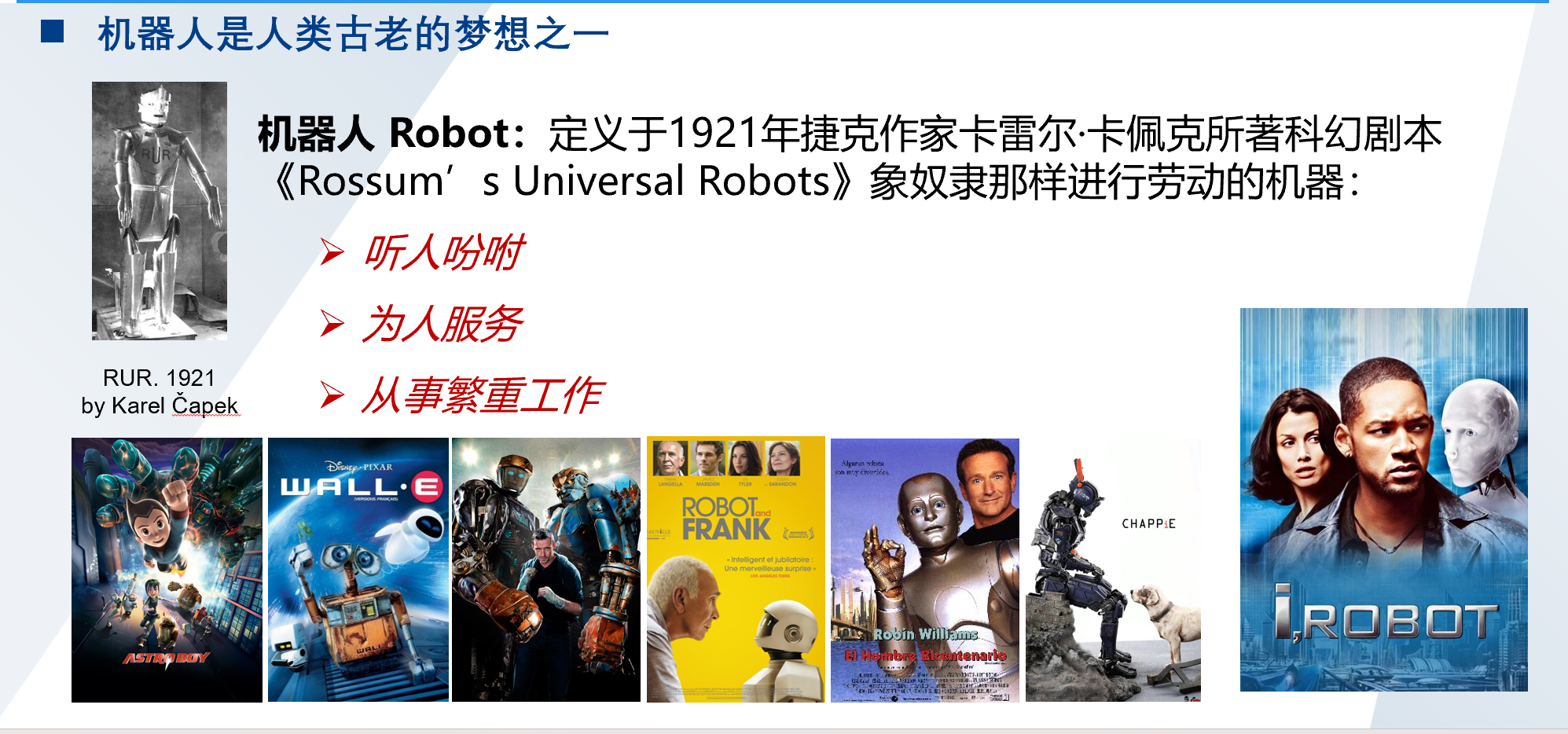
“I,ROBOT”—概念溯源
1921年捷克作家卡雷尔·卡佩克所著科幻剧本《Rossum’s Universal Robots》中第一次定义了机器人,即如奴隶那样进行劳动的机器。剧本中写明机器人具有听人吩咐、为人服务、从事繁重工作的特点。
广义上,现在的机器人是一种结合了机械结构、电子控制和计算机程序,可以感知、决策、运动和交互的机械系统。
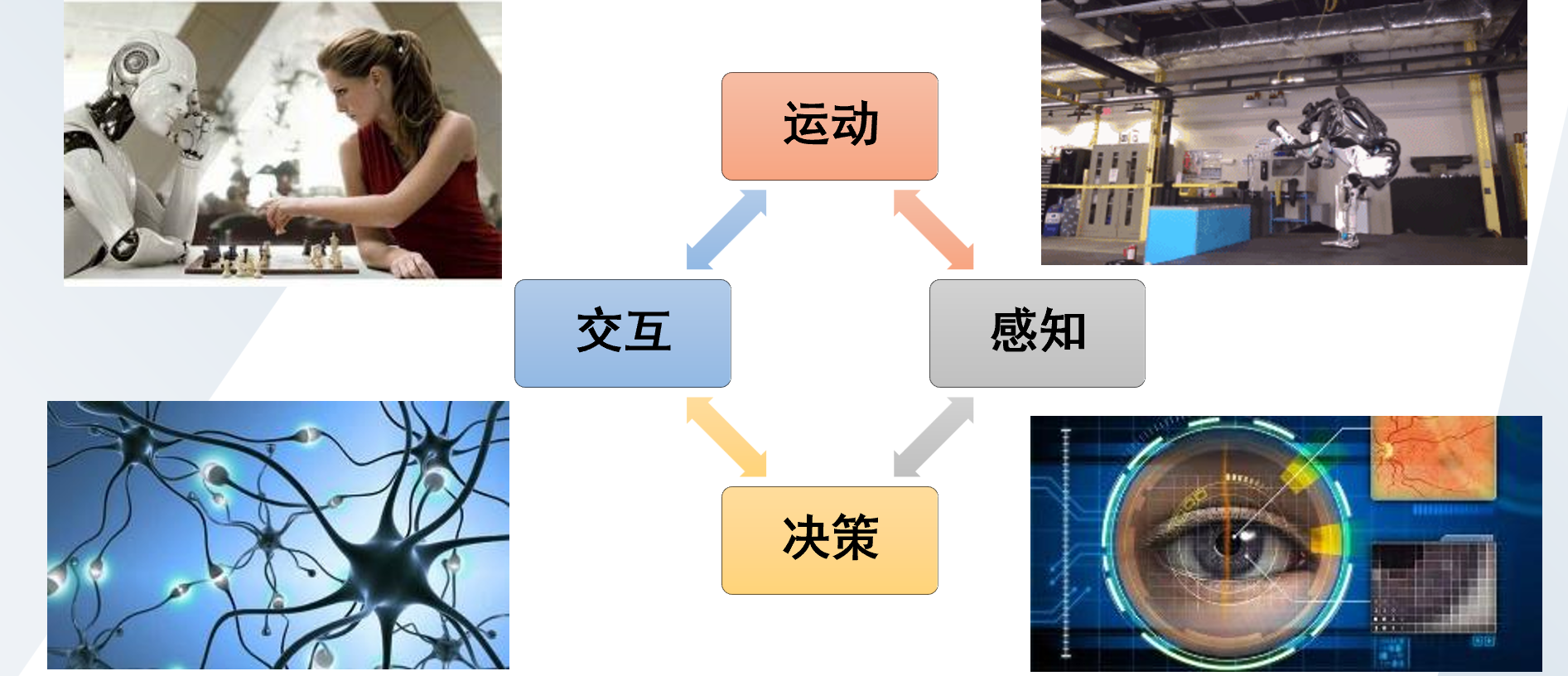
感知:机器人可以使用各种传感器(如视觉传感器、力传感器等)来获取有关周围环境的信息。
决策:基于获取的信息,机器人能够进行分析和决策。
运动:机器人根据其决策执行相应的动作或任务。
交互:机器人与人类或其他实体通过物理或网络信息交流的方式进行沟通和协作。
电影《I,ROBOT》探讨了机器人与人类的关系、技术进步带来的伦理问题以及人工智能的发展方向,其中提出了机器人三大定律。这些定律在实际应用中可能遇到许多复杂情况,特别是在机器人高度智能化后,它们对于这些原则的理解可能会与人类有所差异。随着电影剧情的发展,这些机器人在执行第一法则时遇到了道德困境,即如何判断什么是真正的“伤害”,以及如何在保护人类的同时不侵犯人类的自由意志。

早期探索-技术进步-应用拓展-技术创新
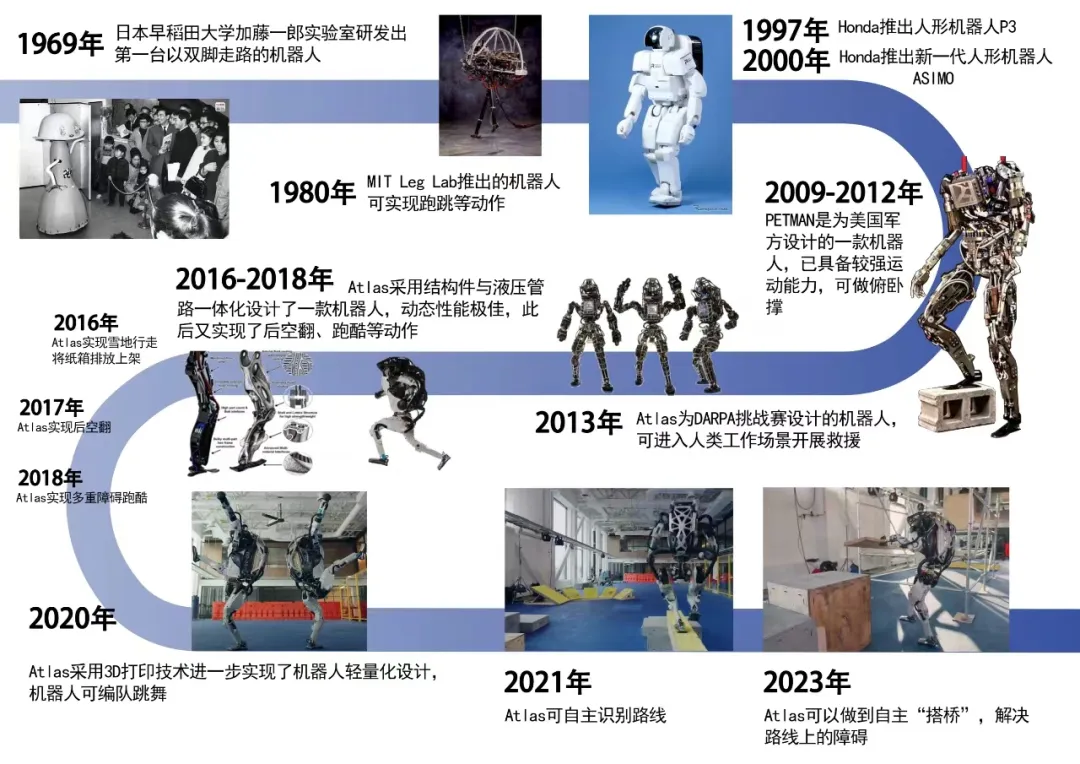
“ASIMO-Atlas-Optimus Gen2”从20世纪60年代末开始,日本和美国等国家就开始了双足机器人的研究。随着时间的推移,双足机器人的控制算法、运动性能和实用化程度得到了显著提升,从最初简单的行走发展到能够执行复杂动作,再到在灾难响应、军事应用等领域的探索。材料科学的进步、3D打印技术的应用等促进了双足机器人的轻量化和性能优化。
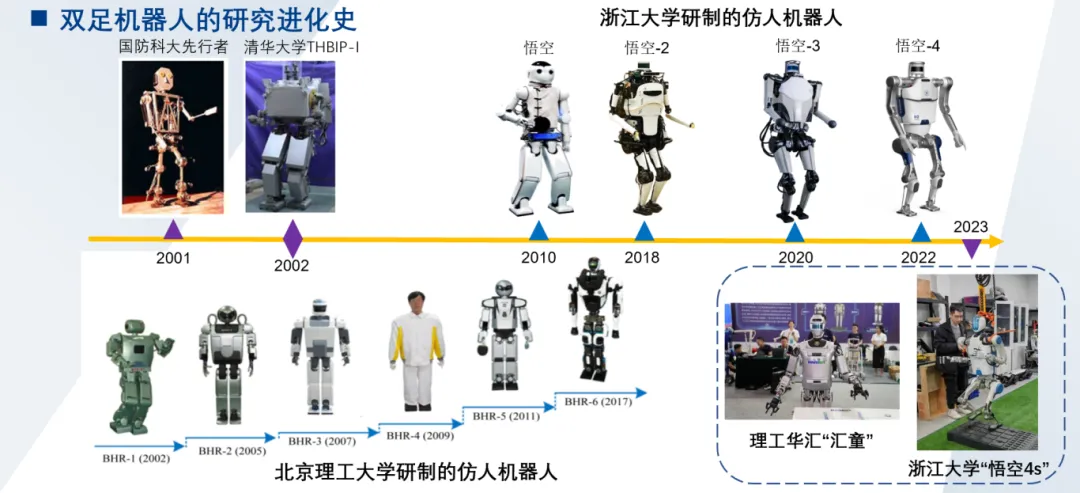
相较于国外机器人,国内人形机器人也在大力发展,2001年开始,国防科大便开始研究人形机器人,此后无论是清华还是北理工都相继投入到人形机器人的研究工作中。由浙大研究的人形机器人悟空,经过多个版本的迭代,现在能够在复杂的道路上行走和跳跃,速度达到6km/h。但是相比于国外的人形机器人,国内技术还有极大的发展空间。
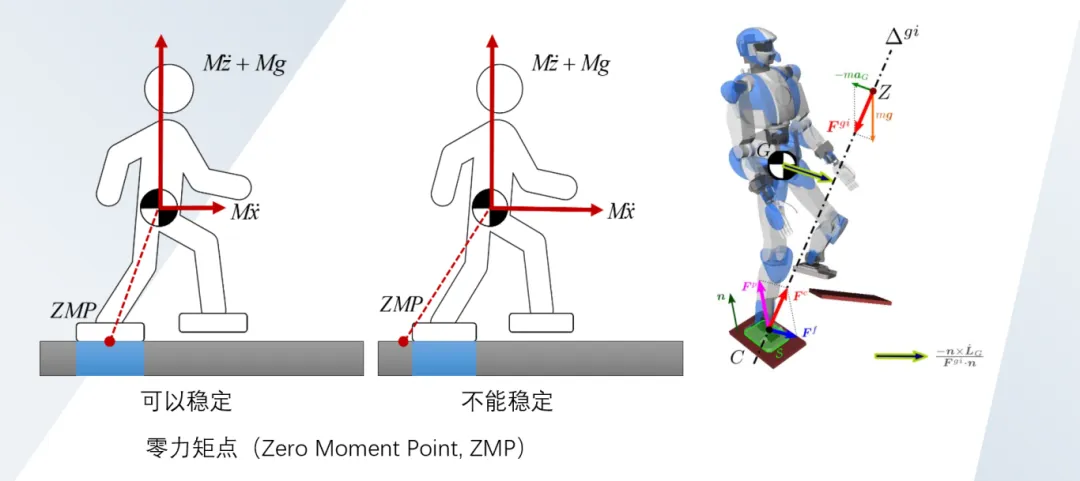
目前双足机器人存在速度慢、稳定性差的问题,无论是在机器人的控制器上,还是机器人操作系统的实时性,都需要进一步的深入研究。而零力矩点是用于分析和控制双足机器人稳定性的重要方法。简单来说,就是机器人在运动过程中,要保证机器人与地面接触的脚范围内,存在一个点,在这个点上机器人所受的惯性力、重力和地面反作用力产生的力矩之和为零。
机器狗?四足机器人!
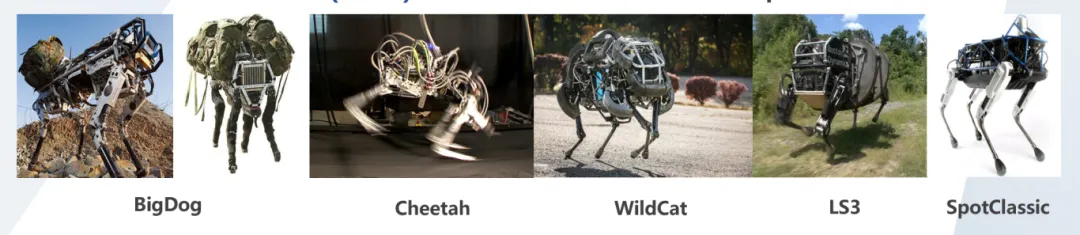
“BigDog-Cheetah-Wildcat-LS3-SpotClasssic” 四足机器人的发展始于21世纪初,Boston Dynamics 开发的BigDog 在 2005 年首次亮相,它展现了强大的越野能力和负载能力,能够穿越崎岖地形并携带重物。2012 年,Cheetah 的推出创造了四足机器人速度的新纪录,最高可达 29 英里/小时(约 46.6 公里/小时),展示了惊人的奔跑能力。WildCat 在 2013 年发布,进一步增强了四足机器人在户外环境中的奔跑性能,LS3项目专注于为军队提供物资运输,而SpotClassic则标志着四足机器人开始转向民用市场,为日常生活和商业应用打开了大门。这些标志性产品的相继问世,推动了四足机器人技术的进步和发展。
四足机器人通过不同的步态指令实现不同的移动方式。从慢到快,分别是爬行(Crawl)、步伐(Pace)、小跑(Trot)、跳跃(Bound)和飞奔(Gallop)。就像我们跑步一样,越快跑就越难保持平衡。四足机器人也是这样,爬行时最稳,可以在不平坦的地方走;小跑时速度快一点,但还能适应不同的地面;飞奔时最快,但需要地面比较平才行。这些步态指令模拟了自然界四足动物运动姿态让四足机器人能在各种地方灵活移动。

来源: 科小二
