
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 吉林大学
吉林大学 
一.引言
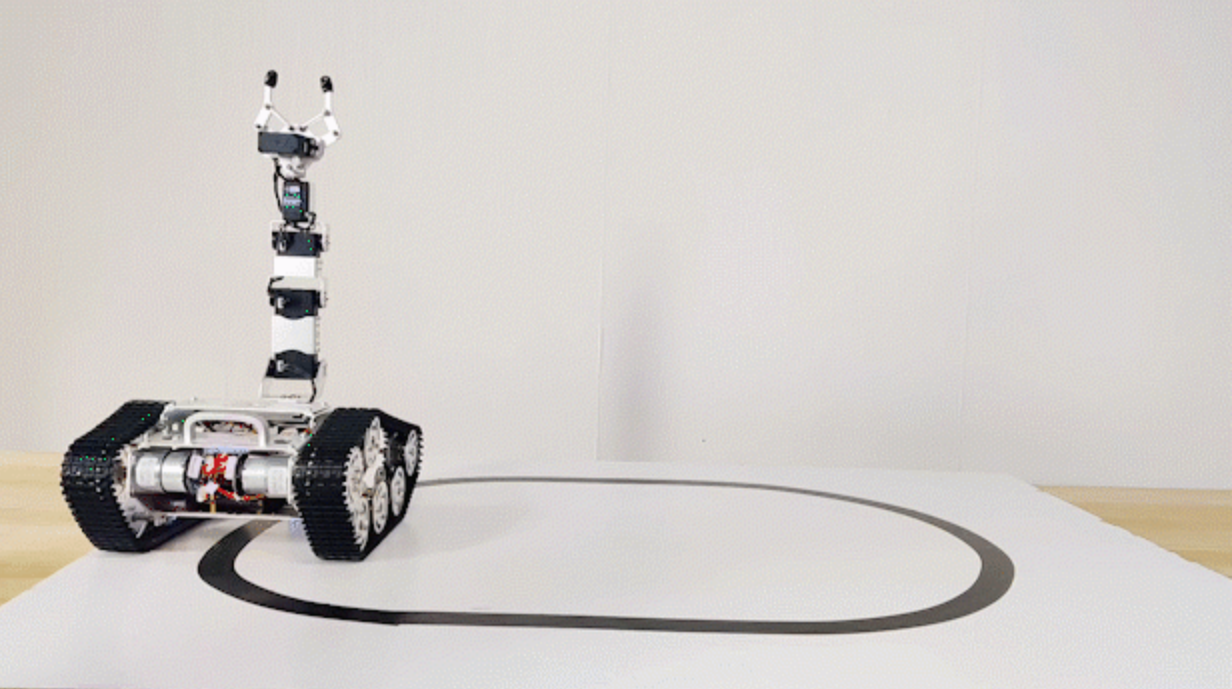
电磁循迹智能小车是一种通过感知周围环境中电磁信号的变化,从而实现自主导航和运动的智能机器人。其工作原理是利用一组电磁传感器来检测地面上特定的电磁信号,通常是由磁性材料放置在地面上所产生的,比如磁性条或者磁性标记。通过分析这些信号的变化,智能小车可以判断自身位置和方向,从而进行导航、避障等操作。

这种智能小车的应用非常广泛,主要包括以下几个方面:
(1)工业自动化:在工厂和仓库等环境中,电磁循迹智能小车可以用于自动化运输、搬运和物流,提高生产效率和降低成本。

(2)物流和配送:在大型仓库、物流中心或者商业中心,这种小车可以帮助实现货物的自动搬运和分拣,提高物流效率。
(3)家庭服务机器人:将电磁循迹技术应用于家庭服务机器人中,可以让机器人更智能地进行家务服务,比如扫地、送餐等。
(4)智能导航:在室内或者室外环境中,这种小车可以用于提供智能导航服务,比如在商场、机场或者展览馆中引导游客。
(5)教育和科研:电磁循迹智能小车也常用于教育和科研领域,用于教学实验、科研研究和机器人竞赛等活动中。

二.电磁循迹技术
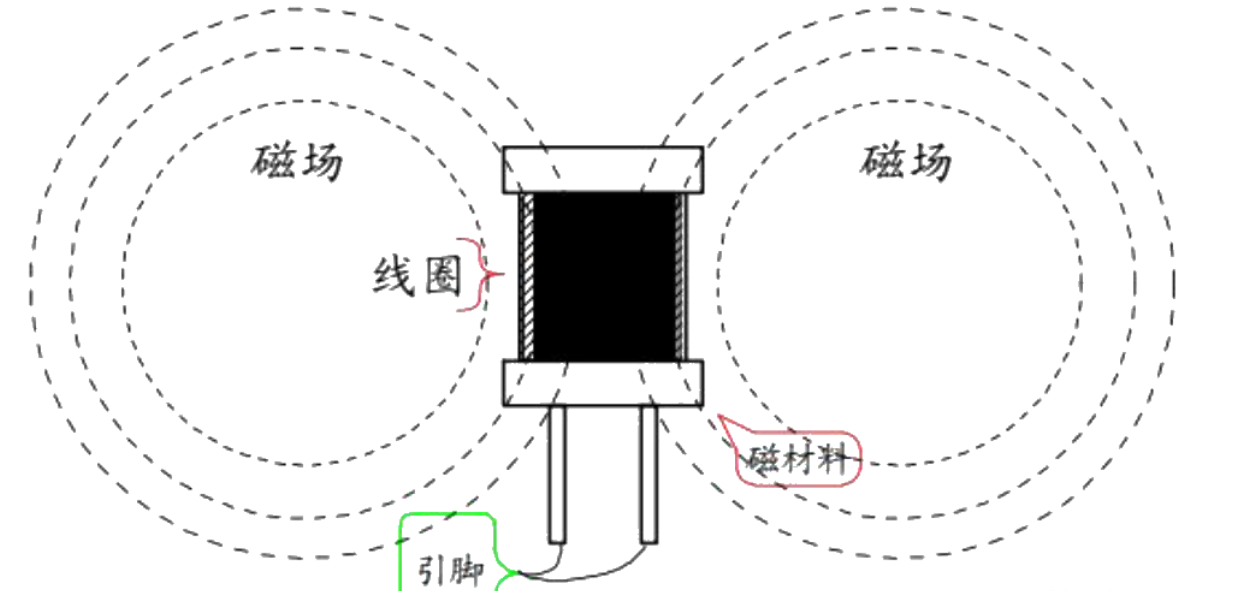
“电生磁”,电磁线通有正弦变化的电流,会在周围产生正弦的磁场,“磁生电”,工字电感就是由N圈线圈构成,变化的磁场+运动切割磁感线,会产生感应电流,经过运放和AD转换得到我们的电磁信号值。
电感距离磁场越近,产生的感应电动势越大,距离越远,产生的感应电动势越小。电感的布局,影响着 运动切割磁感线产生的电流,对循迹与元素识别起着重大影响直观地来说,将车静置在赛道中央,同一水平高度上,与电磁线方向垂直放置的电感,获取的值大。把车放到赛道上,各种姿势各种方向都摆一遍,就能很清楚知道电感方向和铜线方向的关系。
我们通过中学物理知识可以得知,导线通以交变电流之后会产生交变磁场,电感线圈在交变磁场中会产生交变电压,电感距离导线越近电感产生的电压峰峰值则越大,通过对电感感应出来的电压进行放大并整流可以得到一个直流信号,直流信号电压越高距离导线则越近。需要注意的是电感摆放的位置需要让磁感线能够穿过电感的线圈,这样才能正确的感应到磁场大小。接下来我们根据距离导线越近数值越大的理论来合理的假设电感的数据,然后建立一个表格来分析下数据并使用差比和公式计算结果,差比和的公式为(a-b)/(a+b)。
车模位置
电感1数值
电感2数值
差比和计算的值
图1
50
50
0
图2
25
75
-0.5
图3
75
25
0.5
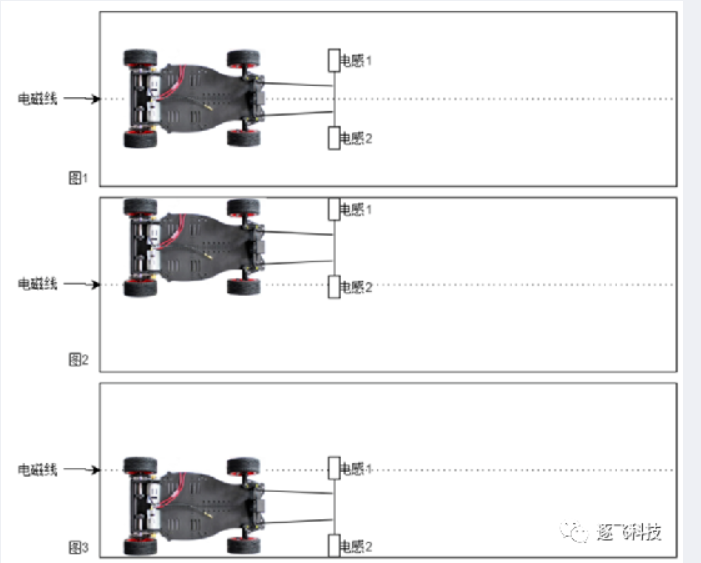
车模距离赛道中心线的距离变近之后差比和计算出来的绝对值也就变小了。因此数值大小表示偏离赛道的程度,在一定范围内车模偏离赛道越远计算出来的值越大。得到了车模偏离赛道的程序之后我们就可以用此数据控制舵机,来使得车模一直沿着赛道中心线前进了。
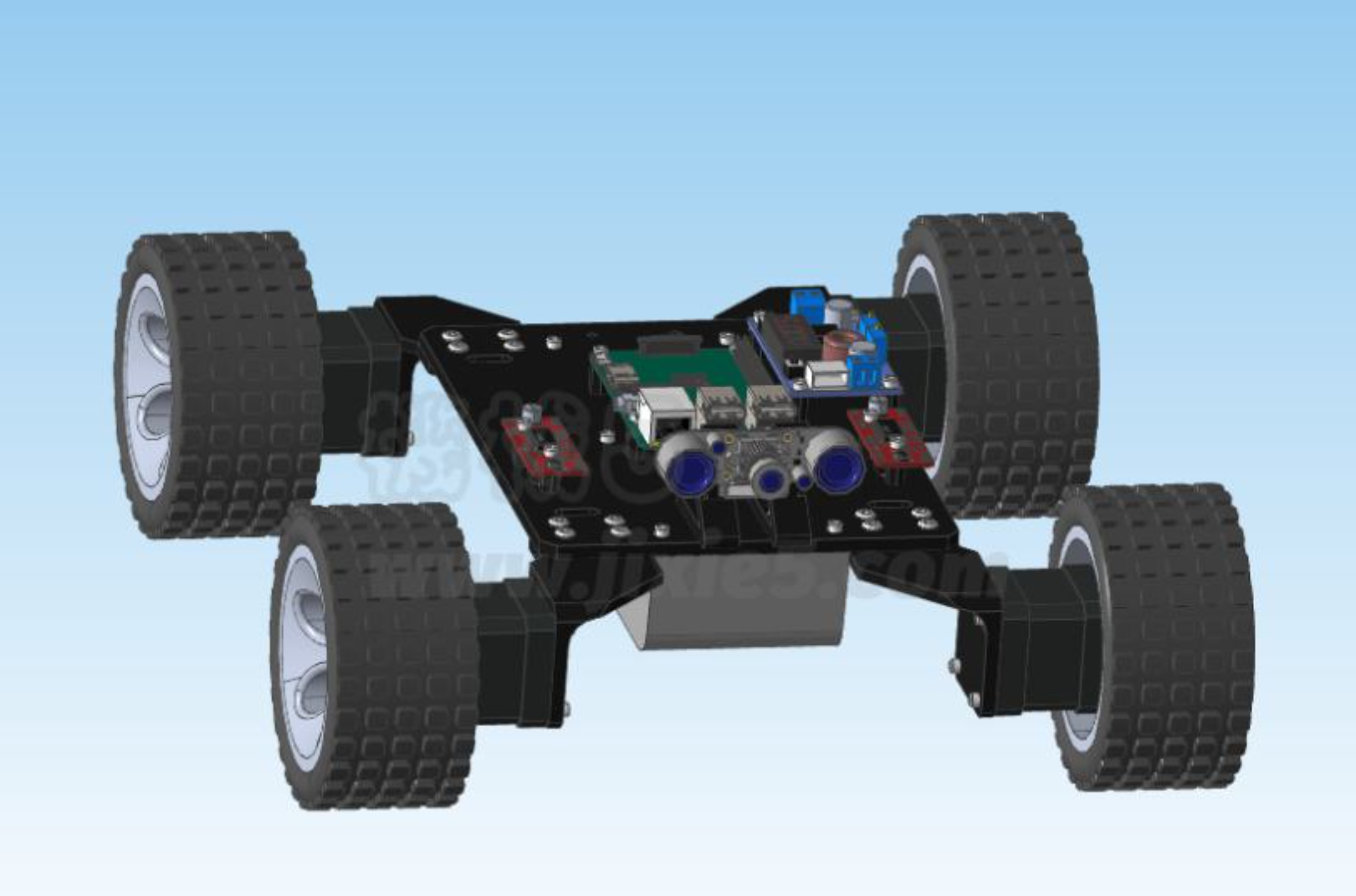
三.组装电磁智能车
搭建电磁循迹小车的第一步是准备基本材料。搭建和编程电磁循迹智能小车需要以下材料和工具:
1.微控制器:我们在本实验中选用单片机型号为STC8H8K64U;
2.电机驱动模块:用于驱动小车的电机,本实验选用DRV8701双驱动;
3.电磁传感器:用于检测轨道上的磁场。本实验选用多路电磁杆;
4.小车底盘。本实验选用三轮车模;
5.电机:本实验兼用无刷电调和有刷电调;
6.电池:为小车提供电源;
7.相关连接线和电路板:用于连接与焊接各组件。
在电磁循迹小车的设计中,一个较为关键的设计是电磁杆的布局。当小车实际登上赛道,会遇到多种不同的地形,这当中会有很多特殊元素都很难判定,比如环岛,三叉。电磁杆的制作非常考验设计者的观察分析能力。
本实验编程使用语言为C,基于Keil5软件完成代码编写。在代码中,常用的算法思路包括:
1.延时函数:用于控制小车的动作时间;
2.条件判断:根据传感器的信号做出决策;
3.数学计算:如计算小车的速度、方向等。
电磁循迹小车的代码设计旨在实现小车根据预设的电磁路线自动行驶。其主要通过对电磁传感器数据的实时监测与分析,以控制小车的运动。在代码中,首先需设置传感器的检测参数,使其能精准感知电磁信号,这个过程包括:采集电感值,对电感值进行滤波处理,将真实值经判断导入后续算法进行目标值的比较,输出结果给电调。依据传感器反馈的数据,系统得以判定小车与路线的相对位置。
根据位置信息,单片机会依照代码发出相应的控制指令,如前进、转弯等,以确保小车沿着电磁路线行驶。同时,还需考虑速度控制、路线切换等因素,以应对不同的情况。
本电磁循迹小车一个特殊之处在于放弃了舵机的使用,采取更加经典的差速法控制小车方向。差速转向中使用的 PID(比例-积分-微分)是一种常见的控制算法。
PID的作用是根据设定值和实际值之间的误差,通过调整比例、积分和微分参数,实现对系统的精确控制。PID 的优点包括:响应快速,能快速对误差做出反应;稳定性好,有助于保持系统的稳定;精度高,可实现精确的控制。在电磁循迹智能小车中,PID 可以帮助小车更准确地跟踪轨道,实现稳定的行驶。
搭建和编程电磁循迹智能小车需要较全面的电子知识和编程技能。在实践过程中,需要不断调试和改进,以实现小车的最佳性能。
四.未来发展趋势
电磁循迹技术在智能导航和自主移动领域有着广阔的发展前景。随着智能制造、物联网和人工智能等技术的不断进步,电磁循迹技术也将不断发展和改进,未来可能出现以下方面的改进和应用:
(1)精准导航和定位技术的改进:未来电磁循迹技术可能会更加精确和稳定,通过结合其他传感器技术(如视觉、激光雷达等),实现更精准的导航和定位,提高小车在复杂环境中的适应能力。
(2)多模式融合导航系统:未来电磁循迹智能小车可能会采用多种导航模式的融合,比如结合惯性导航、视觉导航、GPS导航等技术,以应对不同环境下的导航需求,并提高导航的鲁棒性和准确性。
(3)智能决策与规划:未来电磁循迹智能小车可能会具备更强的智能决策和规划能力,通过深度学习和强化学习等技术,实现对环境的实时感知和分析,从而能够更灵活地应对复杂的场景和任务需求。
(4)多场景应用拓展:除了工业、物流等传统应用领域,电磁循迹技术未来还有望拓展到更多场景,比如智能家居、智慧城市、医疗护理等领域,为人们的生活和工作带来更多便利和效率。
(5)节能环保应用:未来电磁循迹智能小车可能会更加注重节能环保,采用更高效的电池和能源管理技术,减少能源消耗和环境污染,同时也可以应用于环境监测和保护等领域。
五.结论
电磁循迹智能小车作为一种能够通过感知地面电磁信号实现自主导航和运动的智能机器人,具有重要性和巨大的潜力。在提高效率和降低成本方面:电磁循迹智能小车可以应用于工业自动化、物流配送等领域,能够提高生产和物流效率,降低人力成本,从而为企业节约成本,提高竞争力。在实现自主导航和智能移动方面:这种小车可以在无需人工干预的情况下实现自主导航和智能移动,能够在复杂环境中进行准确的定位和路径规划,为各种应用场景提供可靠的自动化解决方案。在拓展应用领域和场景方面:除了传统的工业和物流领域,电磁循迹智能小车还有着广泛的应用潜力,可以应用于家庭服务、智慧城市、医疗护理等领域,为人们的生活和工作带来更多便利和效率。在促进科技创新和发展方面:电磁循迹技术作为智能导航和自主移动的重要技术手段之一,其发展将推动智能机器人、人工智能等领域的发展,促进科技创新和产业升级。
深入了解和探索电磁循迹智能小车领域,不仅可以从中获得技术上的挑战和成就,还能够为社会和经济发展做出重要贡献。通过不断地学习和创新,进一步发掘电磁循迹技术的潜力,推动智能机器人技术的发展,实现人机共生、智能化的未来。
六.参考资料
(1)韩彩霞,黄艺,罗子波.智能循迹小车设计[J].电子设计工程,2023,31(23):58-62.
(2)余致立,王玥,刘江珊.基于GD32单片机的智能循迹小车的设计[J].机械工程与自动化,2024,(01):149-150+154.
(3)张楚金.智能车的前方车辆检测和预警算法研究[D].长沙:湖南大学,2015.
来源: 吉林大学
