
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 大道至简 车行轨上
大道至简 车行轨上 
CRH380BL 型动车组通信网络是实现整个动车组功能的关键,同时也是其监控和诊断的核心。列车通信网络(TCN)系统基于IEC61375-1 构建,是一个分为两级的通信网络,由列车总线 WTB 和车辆总线MVB 组成,均为两路冗余。
CRH380BL 型动车组为 16 辆编组,分为 4 个牵引单元,每个牵引单元内用
MVB 贯穿形成网段。每个 MVB 网段均设有两个互为冗余的中央控制单元(Central control unit,CCU),除此之外在MVB 网段上主要有牵引控制单元(Traction control
unit,TCU)、制动控制单元(Brake
control unit,BCU)、空调控制单元、门控制单元以及诊断系统,如图 8-22 所示。
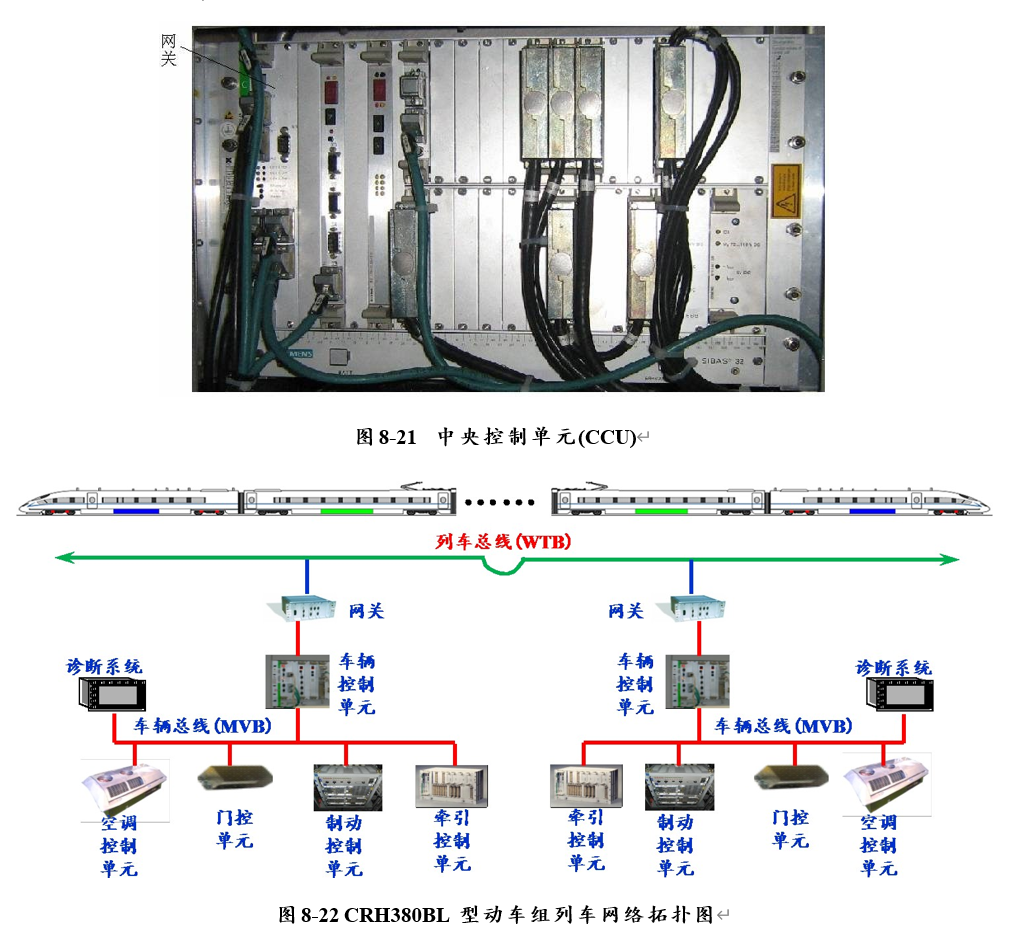
两个牵引单元之间通过TCN 网关与 WTB 连接,完成列车级信息传递。每个牵引单元有两个网关,它们分别集成在两个中央控制单元(CCU)内,互为冗余,但只有在作为主中央控制单元中的网关才参与WTB 和 MVB 通信。
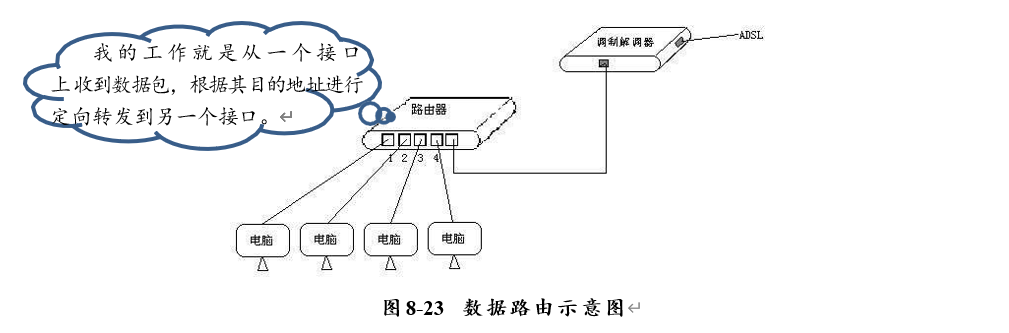
WTB 的作用就是连接四个牵引单元,使两个牵引单元之间进行必要的列车级数据交换。从列车通信和控制的观点来看,CRH380BL 型动车组每个牵引单元都在一个 MVB 车辆总线网段上。WTB 和 MVB 网络协议不一样,它们之间数据交换的基是 TCN 网关,它负责 WTB和 MVB 两个总线之间的数据转换和路由(图 8-23)。
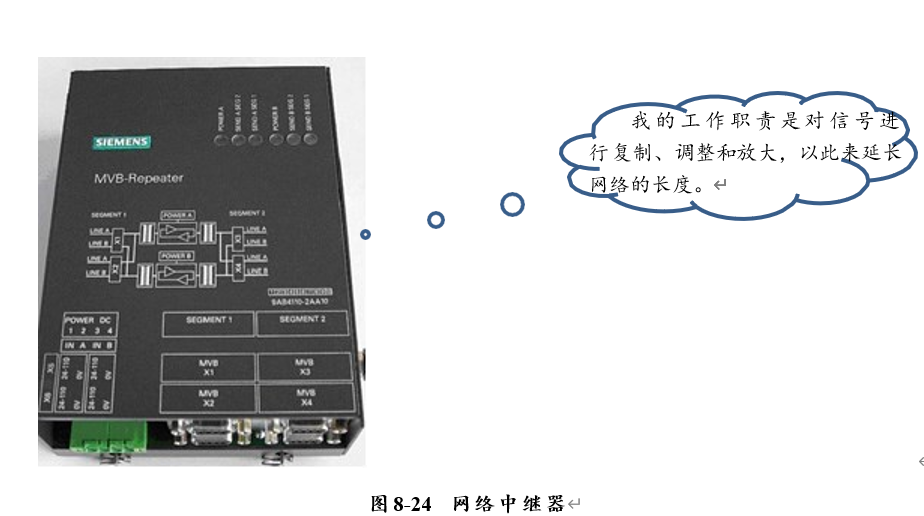
一个牵引单元内 4 辆车构成一个 MVB 网段,它的拓扑结构是固定、不能动态改变的。通信采用中距离传输介质—屏蔽双绞线,在车厢内分为两路冗余布线。一个 MVB 网段内采用构架式的网络结构,即每辆车形成一个 MVB 分支网,通过中继器(图 8-24)、与牵引单元的 MVB 主干网相连接,优点是一个分支网故障时不致影响其它车辆的 MVB 分支网。对于端车,由于冗余的原因有两个MVB 分段,分别通过两个中继器接入整个MVB 网段。
CRH380BL 型动车组牵引与制动系统单元部分将在后续单元中介绍,这里只给大家介绍采用 Controller Area Network(CAN)总线的部分设备级子系统网络。CAN 协议模型结构只取 OSI 模型的物理层、数据链路层和应用层。CAN 的工作方式为多主模式,任意节点在任意时刻可主动地向总线发送信息,如果多个节点同时向总线发送信息,则优先级高的节点先发送,其节点具有自动关闭功能,以避免由于自身的故障而影响总线上其它设备的通信。CAN 信息传输采用短帧结构,传输时间短;通信介质可为双绞线、同轴电缆和光纤等,通信距离最远可达 10km,此时速率小于 5kbit/s。
CRH380BL 动车组每节车(餐车除外)有 2 个或 4 个外门子系统,其中一个系统的控制单元为主外门控制单元,其它外门的门控制单元通过 CAN 总线和其通信。所有外门控单元接收来自车辆控制单元的信号和命令,同时主外门控单元把所有外门控单元的状态和诊断信息传到车辆控制网络中。在外门子系统中,各个门控器在 CAN 总线上的地址通过接口连接器中的 1、5、6、8 以及 9 针的不同配置进行设置。
火灾报警和烟雾探测系统也应用了CAN 总线,其中烟探测控制器和光电感烟探测器通过CAN 总线连接起来并形成一个回路,提高了系统可靠性和安全性。

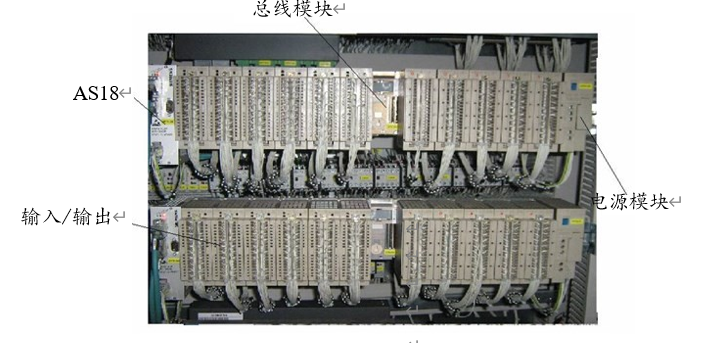
上述外门系统、火灾报警系统以及烟雾探测器(FAS/SD)等设备级网络也需要加入 MVB网络进行信息交互,但它们本身不具有 MVB 通信功能,这时可以通过分布式输入/输出站(图 8-26)作为桥梁,将输入输出开关量信号通过输入/输出站与 MVB 上的其它相关设备相连。采取这种技术措施后,设备级网络里的设备信息就可以由 CCU 或其它设备共享,CCU 也可以控制设备级网络子系统的输出。

对于EMU动车组网络而言,除了传递车辆运行时的控制信息,还要监控车上设备的运行状态,并提供设备维修信息。CRH380BL 动车组诊断系统给列车工作人员和维修人员提供维修信息,整个网络控制的诊断系统集成在司机和乘务员人机交互界面(Man Machine Interface,MMI)中,称为‚动车组中心诊断系统‛。维修信息可通过 MMI 显示出来,并可通过无线通讯接口传输或服务接口下载供相关人员参考和利用。每个司机室的两个 MMI 之间可通过专用以太网在必要时进行通信;与 VB 没有直接接口的子系统可用输入/输出模块(SIBAS-KLIP,图 8-28)
和中心诊断中的中央控制单元进行读取。

(图 8-28 智能外围中端 SIBAS®-KLIP)
(免责声明:内容来源于网络,版权归原作者所有。本文为科普性知识,仅作信息交流之目的,不做商业用途,如涉及作品内容、版权和其它问题,请联系我们删除。)
来源: 大道至简 车行轨上
