
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 《中国科学》杂志社
《中国科学》杂志社 
智能界面粘附能够根据需求在强粘附和弱粘附状态之间灵活切换,实现按需粘附和脱粘的功能,在众多前沿领域备受关注,如机器人、可穿戴设备、智能制造、生物医疗等,有望推动这些领域的创新发展。在智能粘附技术领域,智能粘附干胶(Smart dry adhesives)凭借其独特的优势脱颖而出,成为备受瞩目的研究方向。与传统的化学粘附方法不同,智能干胶主要依靠范德华力实现粘附功能。这种粘附机制赋予了智能干胶诸多优异特性:粘附强度可根据需要进行智能调控;能够适应各种不同材质和形貌的表面;脱粘后无残留物,表面清洁;且无需额外的能量来维持粘附,消耗能量低。基于以上优点,智能干胶在智能制造等高新技术领域大放异彩,发挥着日益重要的作用,推动生产方式向更加智能化和环保化的方向发展。
传统智能粘附干胶长期模仿自然界,尤其是壁虎脚掌上的多级粘附纤毛结构,如图1所示。

图1. 壁虎粘附纤毛结构与壁虎启发的智能纤毛粘附结构。
然而,这些受壁虎启发的智能纤毛粘附面临诸多挑战。
首先是智能粘附长期面临的“调控比矛盾”(粘附强度和粘附调控比之间的矛盾),导致粘附越强的智能干胶越难按需脱粘,这给智能粘附的实际应用带来了很多困难。
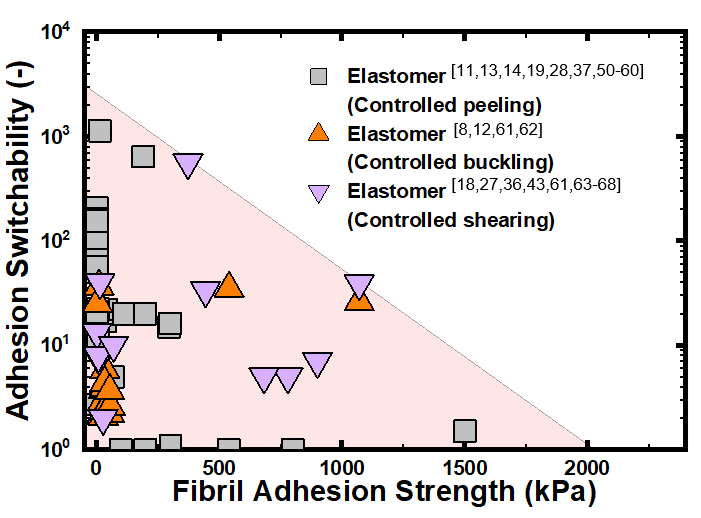
图2. 仿生壁虎的智能纤毛粘附的粘附调控比与粘附强度的数据统计。
此外,粘附纤毛的尺寸效应使得其粘附强度随纤毛半径的增加而降低。为了保持一定的粘附强度,人造粘附纤毛尺寸一般限制在10微米量级或更小范围内(如图3所示),这导致了诸多问题。首先,制备如此微小尺寸的粘附纤毛难度大,成本高昂,通常需要借助特殊的微纳加工设备才能实现。其次,由于比表面积大,微小的纤毛极易相互粘黏,影响材料的重复使用性能。同时,在使用过程中,这些纤毛也很容易因磨损而破坏,降低了其使用的耐久性。

图3. 典型的壁虎仿生粘附纤毛的结构与现有的壁虎仿生粘附纤毛附强度的尺寸效应。
此外,当制备成阵列时,由于载荷在纤毛之间的分布不均,智能纤毛粘附阵列的粘附力并不会随纤维数量的增加而线性增大,反而是由于边缘部分的纤毛承受更大的载荷会先断裂而导致粘附缩放效率(纤毛阵列的粘附强度与单根纤毛的粘附强度之比)随着纤毛阵列的面积的增加而减小,目前最优设计不仅结构复杂,而且只能在200 mm2的表观接触面积上实现26%的粘附缩放效率,如图4所示。

图4. 现有壁虎仿生粘附纤毛阵列附强度的缩放效应。
这些限制因素制约了智能干粘附材料的承载能力。值得注意的是,在自然界中,即使是依赖干粘附的最重动物,如壁虎,其体重也仅限于150克左右。
最近,《国家科学评论》(National Science Review,NSR)在线发表了新加坡南洋理工大学校长讲席教授夏焜(新加坡南洋理工大学前副校长)和清华大学讲席教授高华健(清华大学力学与工程交叉院院长)课题组的研究文章“Fibrillar adhesives with unprecedented adhesion strength, switchability and scalability”,提出了智能纤毛粘附设计新范式,突破了壁虎仿生设计的限制,成功地解决了以上问题与挑战。
论文通讯作者为高华健院士和夏焜校长讲席教授;第一作者为高华健院士和夏焜校长讲席教授共同指导的博士令狐昌鸿(现在为新加坡南洋理工大学博士后研究员);第二作者为湘潭大学-南洋理工大学联合培养博士刘杨承毅(现在为新加坡南洋理工大学博士后研究员);第三和第四作者分别为新加坡南洋理工大学博士生杨旭东和博士后李栋;共同作者包括湘潭大学王秀锋教授、新加坡南洋理工大学王一凡教授(Nanyang Assistant Professor)和俞璟教授;其他共同作者还包括新加坡南洋理工大学本科生李琰、Yee Yuan Tan、Haziq Bin Mohamed Hafiz Mohamed、Fadhli Bin Rohani Mohammad,博士生苏江涛、霍彧成与徐晗彦。

图5. 论文在线发表网页截图。
该研究提出了一种新的纤维状粘附材料设计范式(图1a-b),利用形状记忆聚合物(SMPs)从橡胶态到玻璃态(R2G)的相转变,实现了粘附纤毛的粘附状态在JKR状态(界面应力集中的弱粘附状态)和DMT状态(界面应力均匀分布,达到理论粘附强度的强粘附状态)之间的轻松切换,在单根纤毛的层面实现了前所未有的粘附强度(约2 MPa)、粘附调控比(约2000倍),并且将粘附纤毛的DMT强粘附状态的临界尺寸从传统弹性材料设计的10 um量级突破到了毫米量级。此外,当把粘附纤毛制备成为阵列,其粘附缩放效率在表观接触面积扩大至1000 mm2时仍然能够高达56.8%,同时粘附调控比依然能保持在1000倍的水平。
这一突破性的设计范式克服了传统弹性仿生纤毛智能粘附面临的诸多局限性。通过巧妙利用形状记忆聚合物的材料相变特性,成功地实现了粘附强度和粘附调控比的双提升,突破了“粘附比调控矛盾”的瓶颈。同时,将粘附纤毛尺寸扩展至毫米量级,不仅简化了制造工艺,降低了成本,还提高了其使用的耐久性和可靠性。此外,这种新型纤毛粘附在阵列化方面表现出色,粘附力缩放效率得到显著提升,远超传统弹性仿生纤毛粘附。这使得大面积、高承载的智能粘附成为可能,大大拓宽了智能粘附的应用场景。
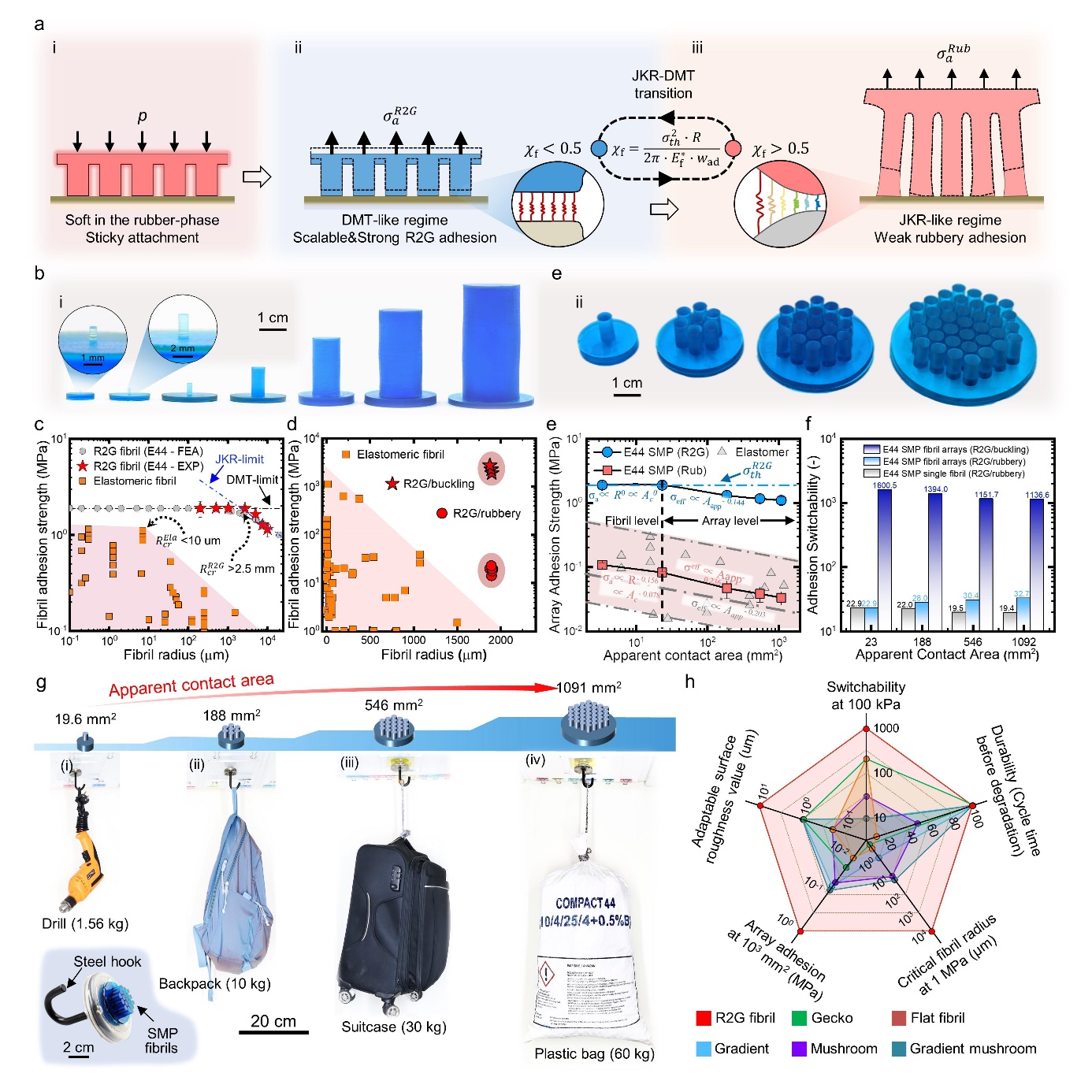
图6. 基于形状记忆聚合物的R2G相变,控制JKR-DMT粘附状态切换的纤毛智能粘附设计。(a) 粘附与脱粘示意图。(b) SMP (i) 粘附纤毛和 (ii) 纤毛阵列样品照片。(c-d) SMP粘附纤毛的(c)粘附强度与(d)粘附调控比测试结果。(e-f) SMP粘附纤毛阵列的(e)粘附强度与(f)粘附调控比测试结果。(g) 使用SMP纤毛粘附阵列作为超强智能粘附干胶挂起不同重物的展示。(h) SMP智能粘附纤毛设计与其他设计的粘附性能的全方位比较。
该设计范式的关键在于选择最优的智能粘附纤毛的半径工作窗口,保证智能纤毛的粘附状态在R2G条件下(在橡胶态接触,在玻璃态承载)为DMT强粘附状态,而在橡胶态时为JKR弱粘附状态。通过外部刺激控制SMP的材料状态,即可实现SMP粘附纤毛的粘附状态的JKR-DMT转变。
令狐昌鸿等人基于其建立的形状记忆聚合物中粘附机制转变的理论,通过全面的理论分析、模拟和实验研究,成功将DMT极限扩展到了2.7 mm。此外,他们还展示了这些SMP智能纤毛粘附惊人的承载能力,基于此设计制备的粘附挂钩能够牢固地支撑重量超过自身2000倍的物体,在接触面积为1000 mm2时稳固地吊起一个成人的重量(60 kg)。并且在使用之后,简单使用一个吹风机加热一下,就能把粘附挂钩轻松地取下来。
这项研究在科学和技术层面都具有深远的意义。在科学层面,该工作首次在微米到毫米尺度范围内系统验证了纤毛粘附的尺寸效应,并突破了以往仿壁虎粘附设计的局限性。从技术层面,基于JKR-DMT转变机制的R2G相变粘附纤毛设计,可以拓展至其他类型的相变材料,如形状记忆合金、液晶弹性体等,推动粘附技术的多元化发展;同时,该设计范式能同时保证MPa级的粘附强度和1000倍以上的粘附调控比,而且制备简单,可缩放性好,能够极大地拓展智能粘附的应用包线,推进智能粘附在高负载场景下的应用,比如攀爬机器人、重载吊装、智能制造、航空航天等领域。
【参考文献】
Changhong LINGHU, Yangchengyi Liu, Xudong Yang, Dong Li, Yee Yuan Tan, Haziq Bin Mohamed Hafiz Mohamed, Fadhli Bin Rohani Mohammad, Zihao Du, Jiangtao Su, Yan Li, Yucheng Huo, Hanyan Xu, Xiufeng Wang, Yifan Wang, Jing Yu, Huajian Gao*, K. Jimmy Hsia*. Fibrillar adhesives with unprecedented adhesion strength, switchability and scalability, National Science Review, 2024, nwae106.
Changhong Linghu, Yangchengyi Liu, Yee Yuan Tan, Jun Heng Marcus Sing, Yuxuan Tang, Aiwu Zhou, Xiufeng Wang, Dong Li, Huajian Gao*, K Jimmy Hsia*. Overcoming the adhesion paradox and switchability conflict on rough surfaces with shape-memory polymers, Proceedings of the National Academy of Sciences, 2023, 120(13): e2221049120.
Changhong Linghu, Xudong Yang, Yangchengyi Liu, Dong Li*, Huajian Gao*, K Jimmy Hsia*. Mechanics of shape-locking-governed R2G adhesion with shape memory polymers, Journal of the Mechanics and Physics of Solids, 2023, 170: 105091.
来源: 《中国科学》杂志社
