
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中国科普博览
中国科普博览 
出品:科普中国
作者:陈丹惠(中国科学院合肥物质科学研究院智能机械研究所)
监制:中国科普博览
每年的9月29日是“世界步行日”,然而,并不是所有群体都能拥有一段“说走就走”的步行体验。对于老年群体与肢体残疾患者来说,像普通人那样正常行走其实是一种奢望。而科技,为这群人提供了行走的权利。
弥补需求缺口,“不行”变“步行”
根据国家统计局发布的关于人口的最新数据可知,截至2022年,我国60岁以上老人达到2.8亿,占全国人口的19.8%。而我国是中风病的高发地区之一,在幸存者中约70%—80%的病人留有不同程度的肢体残疾。

行动不便的老年群体
(图片来源:Veer图库)
此外,由于意外事故引起的肢体损伤患者的数量也不在少数。2021年残疾人事业发展统计公报数据显示,肢体残疾人407万,与其他残疾种类人群相比,人数最多。
我国庞大的肢体残疾人数使得我国康复医疗设备的供给存在巨大缺口。
为了给行动不便的老年人与肢体残疾患者提供更好的康复服务,我国的康复专家、科研人员都在尝试以智能技术助力这类群体的日常出行。由中国科学院合肥物质科学研究院机械智能研究所先进制造中心研发的下肢外骨骼助行机器人,就是康复医疗设备的成果之一。
下肢外骨骼助行机器人是穿戴在操作者下肢的一种典型的人机一体化系统,综合了仿生机构、传感信息检测与融合、人体意图识别与协调控制等机器人技术,有机地结合了操作者的智力和机器人的“体力”。
这个设备主要面向中风、脊柱损伤两大类患者与老人的助行,能够帮助他们实现平地行走、上下楼梯、原地平衡踏步、跨越障碍物等典型的运动步态。
人机搭配,步行不累
2014年初,中国科学院合肥物质科学研究院机械智能研究所先进制造中心自立项目研制下肢助力外骨骼,不断改进、完善,并将样机投入医院进一步测试、试用。如今,下肢外骨骼助行机器人已处于初步的应用阶段

助老助残样机
(图片来源:作者)
这种外骨骼是一个有源系统,控制系统基于一体化设计思路,建立基于CAN总线(一种用于实时应用的串行通讯协议总线,可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一)的外骨骼机器人分布式控制系统架构,实现机器人高效、可靠的控制。该设备通过电机驱动产生所需助力,比如髋关节迈不出、膝关节无力,经过计算电机输出合适的助力。
驱动单元置于外骨骼系统中,外骨骼的机械设计同样基于一体化架构和模块化设计思想,助残和助老两类机器人总体架构一致,只是在髋关节与踝关节的自由度配置有所不同。
当机器人用于助力时,其髋关节和踝关节与人体自由度配置一致,髋关节除了主动自由度之外,还有2个被动自由度,脚踝也配置了2个被动自由度;当机器人用于助残时,残疾患者的髋关节和踝关节已丧失了主动驱动能力,因此,取消髋关节和踝关节的被动自由度。
下图中为大家更直观地展示了两类机器人的穿戴示意、总体虚拟样机及髋踝关节的虚拟样机。

助老(助残)机器人虚拟样图
(图片来源:该研究项目组)
整个机器人分为左腿外骨骼、右腿外骨骼、后背架、胸部束带、控制器、电源及背包等多个模块,模块间设计有快速拆装接口,可实现外骨骼系统的快速穿上及脱下,同时在运输过程中通过折叠可有效减小占用空间。
由于下肢外骨骼助行机器人需要与人体协调运动,外骨骼机器人与穿戴者构成一个人机系统。为了达到协调运动的目的,除了准确的意图识别,还必须构建有效的交互通道、控制环路与控制算法,才能实现人机运动的协调统一。
人机协调控制系统架构如下图所示,人机内部作用机制可由意图识别和机器人运动输出两个交互通道进行阐释。通过这两个交互通道,人体的运动意图由机器人准确实时获取,机器人按照设计的控制作用于人体,进而达到人机交互作用的协调统一。
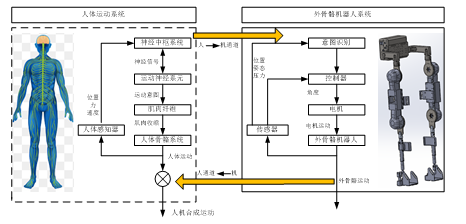
人机协调控制系统架构图
(图片来源:作者)
结语
随着我国科学技术力量的不断提升,在电机、谐波减速机、伺服驱动器、扭矩传感器等关键部件有了重大突破,为自主研发下肢助行机器人提供了有力的基础保障。在科研人员潜心研究、集智攻关、团结协作下,相信在不久的将来,肢体残疾或腿脚不便的人群也可以“健步如飞”!

来源: 中国科普博览
内容资源由项目单位提供
