图文
版权归原作者所有,如有侵权,请联系我们
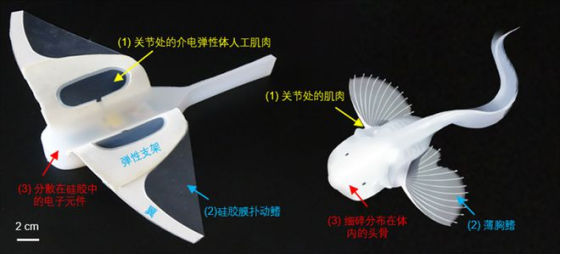
图文简介: 受深海生物特性的启发,来自浙江大学、之江实验室的科研团队及其合作者开发了一种能用于深海探测的无线自供能软体机器人
图为钝口拟狮子鱼
软体机器人与钝口拟狮子鱼对比图
机器人深海试验

 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科普吉林
科普吉林