
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助

急回运动
右图所示为一曲柄摇杆机构,设曲柄AB为原动件,在其转动一周的过程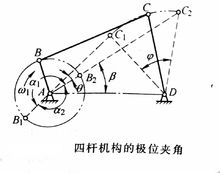 中有两次与连杆共线,这时摇杆CD分别处于两极限位置
中有两次与连杆共线,这时摇杆CD分别处于两极限位置 和
和 。机构所处的这两个位置称为极位。机构在两个极位时,原动件AB所在两个位置之间的夹角
。机构所处的这两个位置称为极位。机构在两个极位时,原动件AB所在两个位置之间的夹角 称为极位夹角(crank angle between two limit positions)。
称为极位夹角(crank angle between two limit positions)。
当曲柄以等角速度 顺时针转过
顺时针转过 时,摇杆将由位置
时,摇杆将由位置 摆到
摆到 ,其摆角为
,其摆角为 ,设所需时间为
,设所需时间为 ,C点的平均速度为
,C点的平均速度为 ;当曲柄继续转过
;当曲柄继续转过 时,摇杆又从位置回到,摆角任然是,设所需时间为
时,摇杆又从位置回到,摆角任然是,设所需时间为 ,C点的平均速度为
,C点的平均速度为 。由于曲柄为等角速度转动,而
。由于曲柄为等角速度转动,而 ,所以有
,所以有 。摇杆这种性质的运动称为急回运动(quick-return motion)2。
。摇杆这种性质的运动称为急回运动(quick-return motion)2。
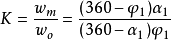
衡量参数为了表明急回运动的急回程度,可用行程速度变化系数或行程速比系数(coefficient of travel speed variation)K来衡量,即

上式表明,当机构存在极位夹角 时,机构便具有急回运动特性, 角越大,K值越大,机构的急回运动性质也越显著2。
一般双曲柄机构的行程速比变化系数K可如下求得:如右图a所示: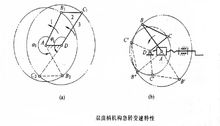
设曲柄AB为原动件,做匀速转动,在连杆BC与机架AD平行的两位置,两曲柄的角速度相等,即 。当主动曲柄由
。当主动曲柄由 位置逆时针转至
位置逆时针转至 位置时,主动曲柄转过
位置时,主动曲柄转过 ,从动曲柄转过
,从动曲柄转过 。在此区间,
。在此区间, ,设其平均值为
,设其平均值为 ;而在其余区间,
;而在其余区间, ,设其平均值为
,设其平均值为 ,故双曲柄机构的行程速度变化系数K为
,故双曲柄机构的行程速度变化系数K为
 由上式可知,比值
由上式可知,比值 越大,K值也就越大,故一般双曲柄机构可有很大的行程速度变化系数K,并可用改变机架长度等方法来改变行程速度变化系数,故常用作可调变速转动机构(如右图 b)。
越大,K值也就越大,故一般双曲柄机构可有很大的行程速度变化系数K,并可用改变机架长度等方法来改变行程速度变化系数,故常用作可调变速转动机构(如右图 b)。
工程应用机构急回运动特性在工程上的应用有三种情况:第一种情况是工作行程要求慢速前进,以利于切削、冲压等工作的进行,而回程时为节省空回时间,则要求快速返回,如牛头刨床、插床等就是如此,这是常见的情况。第二种情况是对某些颚式破碎机,要求其动鄂快进慢退,使已被破坏的矿石能及时推出鄂板,避免矿石的过粉碎(因破碎后的矿石有一定的粒度要求)。第三种情况是一些设备在正、反行程中均在工作,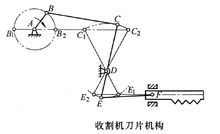 故无急回要求,如右图所示的收割机中的割刀片的运动2。某些机载搜索雷达的摇头机构也是如此。
故无急回要求,如右图所示的收割机中的割刀片的运动2。某些机载搜索雷达的摇头机构也是如此。
急回机构的急回方向与原动件的回转方向有关,为避免把急回方向弄错,在有急回要求的设备上应明显标志出原动件的正确回转方向。
对于有急回运动要求的机械,在设计时,应先确定行程速度变化系数K,求出 角后,再设计各杆的尺寸,其中 。
。
