
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助

结构简介
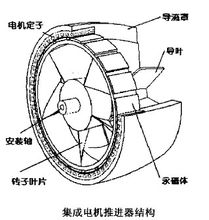 右图是集成电机推进器结构图。集成电机推进器由集成电机,导流罩,转子叶片和静叶栅组成。电机用于直接驱动螺旋桨,电机的转子和泵喷推进器的转子设计为一体,电机磁钢安装在转子轮缘上,转子通过轴承安装在安装轴上,可以绕轴自由转动。电机的定子和推进器导流罩设计为一体,电机的电枢铁心安装固定在导流罩内。电机的转子和定子需要分别进行绝缘和密封处理,整个电机工作在水中,电机的散热问题可以得到很好的解决。推进器的静叶栅安装在转子的后方,用于消除液流的旋转运动,平衡扭矩。集成电机推进模块(IMP)通过安装轴可以比较方便的安装在水下航行器上,电机电缆通过导流罩,静叶栅和安装轴中的通道与电机控制装置连接。控制装置安装在水下航行器内部,由计算机控制。1
右图是集成电机推进器结构图。集成电机推进器由集成电机,导流罩,转子叶片和静叶栅组成。电机用于直接驱动螺旋桨,电机的转子和泵喷推进器的转子设计为一体,电机磁钢安装在转子轮缘上,转子通过轴承安装在安装轴上,可以绕轴自由转动。电机的定子和推进器导流罩设计为一体,电机的电枢铁心安装固定在导流罩内。电机的转子和定子需要分别进行绝缘和密封处理,整个电机工作在水中,电机的散热问题可以得到很好的解决。推进器的静叶栅安装在转子的后方,用于消除液流的旋转运动,平衡扭矩。集成电机推进模块(IMP)通过安装轴可以比较方便的安装在水下航行器上,电机电缆通过导流罩,静叶栅和安装轴中的通道与电机控制装置连接。控制装置安装在水下航行器内部,由计算机控制。1
特种电机类型的选择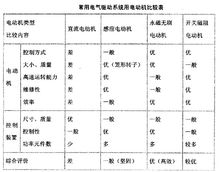 电动机类型的选择对动力系统以及航行器整体性能有较大影响,需要对不同电动机及其控制方式进行比较和分析。目前正在应用或开发的中小功率驱动电机主要有直流电动机、感应电动机、永磁无刷电动机、开关磁阻电动机四类。由这四类电动机所组成的驱动系统,其总体比较如表所示。
电动机类型的选择对动力系统以及航行器整体性能有较大影响,需要对不同电动机及其控制方式进行比较和分析。目前正在应用或开发的中小功率驱动电机主要有直流电动机、感应电动机、永磁无刷电动机、开关磁阻电动机四类。由这四类电动机所组成的驱动系统,其总体比较如表所示。
直流电动机具有结构简单的特点并有优良电磁转矩控制的特性,所以直到 20世纪80年代中期它仍是国内外的主要研发对象,目前直流驱动系统还在广泛的应用。但是普通直流电动机的机械换向结构易产生电火花,不宜在多尘、潮湿、易燃易爆环境中使用,其换向器维护困难,很难向大容量、高速度发展。此外,电火花产生的电磁干扰,对高度电子化的水下航行器来说将是致命的。此外,直流电动机价格较高、体积和重量大。随着控制理论和电力电子技术的发展,直流驱动系统与其它驱动系统相比,己处于劣势。
感应电动机是目前应用最广泛的电机,厂矿企业,交通工具,娱乐,科研农业生产,日常生活都离不开感应电动机。常见的有鼠笼式异步电动机,绕线式异步电动机和各种控制用电动机三大类。一般的感应电机有启动力矩小、过载能力低、体积大、效率低、调速不理想等缺点,在要求较高的场合下,往往不能满足要求。
永磁无刷电动机系统可以分为两类,一类是方波驱动的无刷直流电动机系统(BDCM),另一类是永磁同步电动机系统(PMSM),也称之为正弦波驱动的无刷直流电动机系统。BDCM系统不需要绝对位置传感器,一般采用霍尔元件或增量式码盘,也可以通过检测反电动势波形换相。PMSM系统一般需要绝对式码盘或旋转变压器等转子位置传感器。从磁铁所处不同位置的结构上看,永磁无刷电动机可以分成表面型、镶嵌型、深埋式等结构型式。
开关磁 阻电动机(SRM)目前己投入实际使用,SRM是没有任何形式的转子导体和永久磁铁的无刷电动机,它的定子磁极和转子磁极都是凸的。由于SRM具有集中的定子绕组和脉冲电流,其功率变换器可以采用更可靠的电路拓扑形式。SRM具有简单可靠、在较宽转速和转矩范围内高效运行、控制灵活、可四象限运行、响应速度快、成本较低等优点。但SRM有转矩波动大、噪声大、需要位置检测器、系统非线性特性等缺点。所以,目前应用还受到限制。1
可以看到,相对而言无刷直流电机结合了直流电机与交流同步电机的优点,具有体积小,寿命长,控制简单,调速精度高的特点,且不会失步。考虑到集成电机推进系统使用的特种电机在结构上受到了很大限制,并且推进系统对电机调速性能的要求,集成电机推进系统使用永磁直流无刷电机是比较适合的。
无刷直流电动机可分为正弦波电机和方波电机,正弦波电机的磁通分布为正弦波形式。方波电机的磁通分布为120。的平顶方波,瓦片永磁体的充磁方向为径向激磁,极弧宽度大于120’电角度,若采用整距集中绕组,可获得梯形反电势,电枢电流为矩形波。推进系统中选用了方波电机,它与正弦波电机相比,具有电机与电力电子控制电路结构简单、工作可靠、在同样的情况下材料利用率高,出力大、控制方法简单的优点。
发展及应用IMP最早是由美国海军水下作战中心和宾夕法尼亚州立大学应用研究实验室联合研制的,最初用于无人潜行器,是把电机放在潜行器的外罩内。这种布置省去了常规电机的冷却水套,电机辅助冷却系统,驱动轴和连轴节。这样可以增加潜行器的有效负载,而且内部空间的布置非常灵活,大有好处。节省下来的空阃可以用于安装辅助传感器或储存能量,从而提高了执行任务的能力和续航力。该IMP的电机选用永磁同步电机,这种电机的优点是功率密度大、效率高而且声学性能极佳。
正是由于IMP的优点突出,西方一些发达国家很重视IMP的发展。目前IMP的应用领域不断的扩大,除了在水下机器人应用外,随着推进功率的提高和某些关键技术的成熟,有些IMP模块将逐渐被用于电动鱼雷和潜艇电力推进系统。IMP模块有着十分广阔的发展前景,由于他相对传统的电力推进装置有明显的优势,它的出现很可能会对水下推进带来一次革命。
但是,在国内对集成电机推进装置的研究可以说还是空白,到目前为止,未见到有关产品或实验样机的报道,国内相关资料也寥寥无几。
优点集成电机推进模块相对现有推进装置的优点可以总结为一下几点:
1.大多的IMP的电机都使用无刷直流电动机(一种同步电机),无刷直流电动机是电动机技术和电子技术结合的机电一体化新型电机。无刷直流电动机的主要特征是具有与普通有刷直流电动机相似的机械特性以及必须有电子换向电路。无刷直流电动机彻底取消了机械换向器和电刷,这样在可靠性方面和电磁兼容方面有了很大的改善,同时无刷电机又具备和传统直流电动机相同的线性机械特性,有调速范围宽、起动力矩大、效率高等优点。
2.由于IMP只占用航行器内部很小的体积,这样可以使航行器有效容积得到很好利用,节省下来的内部空间可以用于安放仪器或电池,从而提高了航行器执行任务的能力和航程,而传统的推进装置则要占用很大一部分航行器内部体积。
3.IMP推进器的噪音小,集成电机推进器的螺旋桨是由电机直接带动的,而且螺旋桨导管也可以抑制空泡的出现,所以整个装置噪音较低。
4.整个IMP可后期安装,从而减小了建造周期,便于维护。
5.相对传统的电力推进装置,由于IMP是工作在水中环境的所以在电机设计中基本不需要考虑电机冷却问题,同时IMP也省去了联轴节等传动装景,这样增加了动力推进系统的靠性。2
水下特种推进电机的设计特种电机的总体方案设计集成电机推进器电机的主要技术指标如下:
(1 )额定输出功率:P≈160w;( 2)额定电流 :IN
