
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科普中国创作培育计划
科普中国创作培育计划 
在当代生物科技的前沿领域,美国塔夫茨大学(位于马萨诸塞州)研究团队开发的毫米级活体机器人“爪蟾机器人”(Xenobot)堪称突破性创新。这些直径仅0.5~1毫米的微型生物机器人由非洲爪蟾(Xenopus laevis)胚胎表皮细胞和心肌细胞重组构建,其独特的生物电信号传导系统(传导速度0.1米/秒)模糊了生命体与机械的传统界限,为再生医学和微创医疗开辟了新途径。
这些外观呈云絮状的活体机器人并非简单拼装,而是通过计算机算法(分辨率达10微米)精确指导500~1000个胚胎干细胞自组织形成的功能性结构。在特定培养条件下(温度28℃、pH7.4),它们能自主运动(速度0.1毫米/秒)并完成微物体运输等基础任务,持续存活时间可达10天。
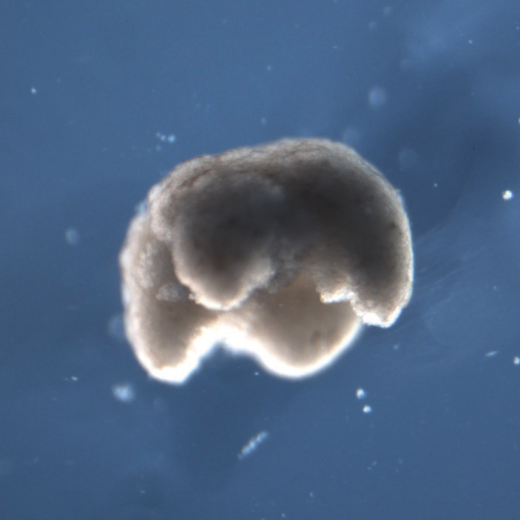
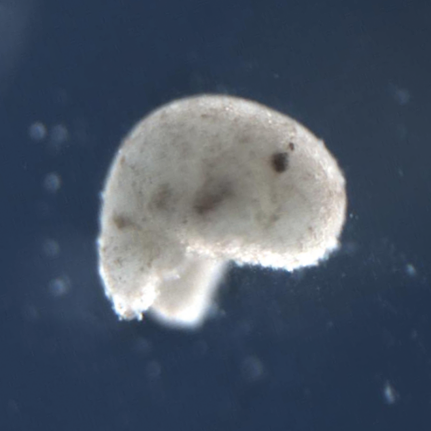
爪蟾机器人直径为650至750微米,以蛙类胚胎为原料制成。
这些微小却神奇的爪蟾机器人,直径仅相当于一根头发丝的宽度(650-750微米),是从青蛙胚胎中精心培育而来。科学家们像指挥交响乐一样,精确引导胚胎干细胞分化成不同细胞——坚韧的皮肤细胞构成骨架,而能自主跳动的心肌细胞则成为动力源。借助超级计算机的强大算力,研究人员模拟了上百万种细胞排列组合,最终找到了最优设计方案,就像用细胞拼出了一幅会动的生物拼图。
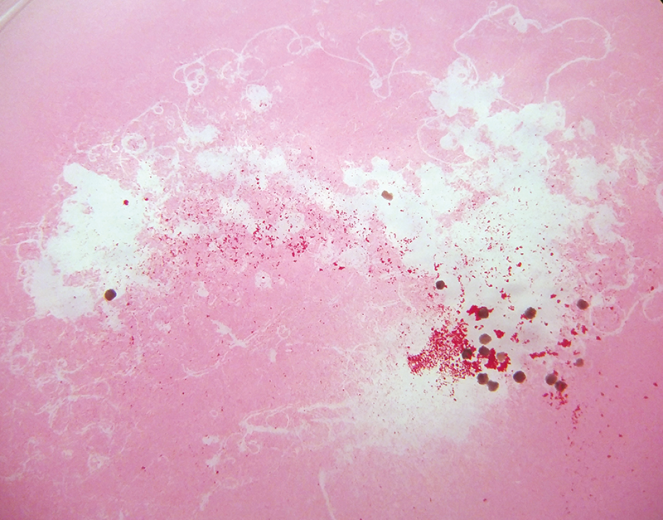
这些痕迹是一群爪蟾机器人爬行并移动微粒的轨迹
这些活体小机器能在培养液中存活长达10天,并以不同的优雅姿态游动: 有的像尺蠖一样直线前进,有的则跳着优美的圆舞曲。最有趣的是,模仿自然界“两头两尾”设计的版本,运动效率最高,就像一条微型毛毛虫在水里快乐地爬行。
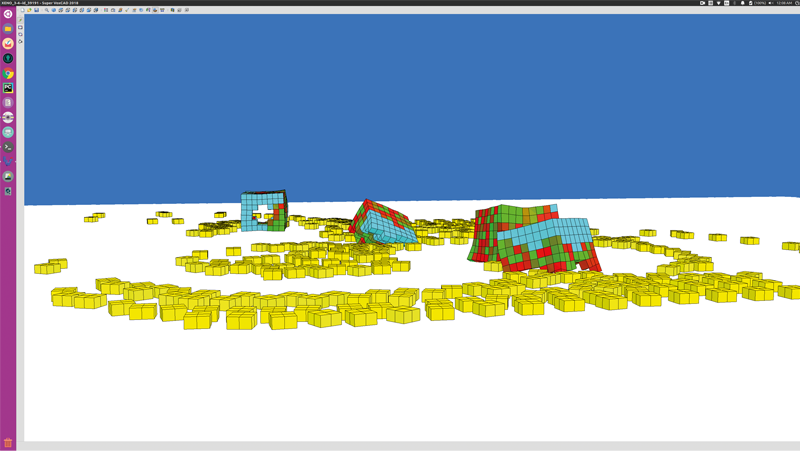
依据设计的不同,爪蟾机器人的移动方向也不一样:例如,在这个超级电脑程序中,可以模拟出直线或椭圆形轨道。打造活体机器人的一大挑战在于弄清楚各细胞该如何配置。为了应对这一挑战,研究员与佛蒙特大学展开了合作,他们利用超级电脑运行了演化算法。这一算法能够模拟出细胞的不同配置,从而帮助研究员理解和预测不同配置对活体机器人性能的影响。
在研究过程中,研究员根据想要的特性,如耐用性和移动性等,对模拟结果进行了分析和优化。他们发现,一种最耐用的形态是模仿大自然中常见的结构,即前后各一条腿,中间以心肌细胞连结。这种配置的爪蟾机器人活动方式就像毛虫或蠕虫爬行,能够在水溶液中有效地移动。通过这种方式,研究员成功地打造出了具有特定功能和特性的爪蟾机器人。这一成果不仅展示了活体机器人制造的潜力,也为未来的研究和应用提供了重要的参考和启示。
从蛙类细胞到具备运作能力的机器人,爪蟾机器人的制作过程极为精细,主要包含以下关键步骤:首先,绘制生物蓝图。借助超级电脑,将不同功能的细胞类比为彩色积木,模拟推算出细胞排列与配置方案,为打造具备特定功能的爪蟾机器人奠定基础。接着进行干细胞采集。使用一条宽约13微米的微型电烧线,精准刮擦发育中胚胎的最上层,获取所需的干细胞。
采集完成后,将干细胞置于低钙镁培养基中。在后续塑形阶段,钙镁离子将发挥关键作用,促使细胞凝结成块。之后对溶液进行搅拌,使采集到的细胞彼此分离。再对分离出的单个干细胞施以化学或基因处理手段,引导其分化成不同细胞类型。分化后的细胞被置于装有水的培养盘中保存,以备后续构建机器人之用。
进入建造环节,依据超级电脑模拟出的模型,利用微量滴管,人工将这些细胞逐一夹取,并分层排列。为使细胞紧密黏合,将培养环境中的水替换为维持溶液,让所有细胞凝聚成一个整体。
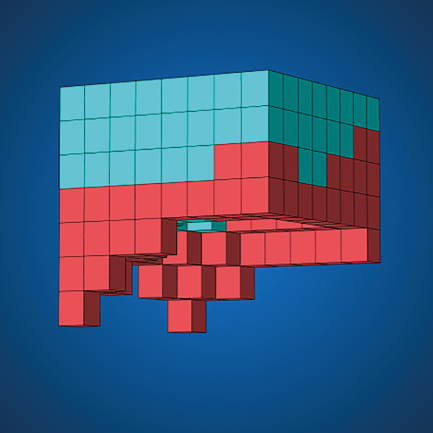
干细胞必须成为合适的组成单位
最后是“画龙点睛”之笔,运用另一条微型电烧线和手术钳,对细胞组合体进行精细雕琢,确保所有细胞精准就位,最终打造出爪蟾机器人。
这一过程不仅要求研究人员对细胞分化、组织形成以及生物体功能有深入的理解,还要求他们能够将这些知识转化为可被超级电脑理解和模拟的数学模型。这项科技不仅展示了细胞的可塑性,也为我们提供了一种全新的思路和方法来研究和应用细胞。未来,其他科学家可能会借鉴这种方法,尝试打造出不同形状和功能的活体机器人。如果这项技术能够进一步成熟和完善,我们或许能够利用它来培育出具有特定功能的器官和组织,为医学领域带来革命性的突破。
文中图片均来源于《How it works》杂志
作者:《how it works》科普团队
审核:黄乘明 中国科学院动物研究所研究员,海南大学特聘教授,中国动物学会监事,中国野生动物保护协会理事
来源: 科普中国创作培育计划
内容资源由项目单位提供
