
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中移科协
中移科协 
在三维重建技术从 “传统低效” 向 “高效逼真” 跨越的进程中,3DGS 凭借颠覆性的场景表示与渲染架构,为高精度三维重建提供了全新可能。本文将聚焦 3DGS 技术落地的核心环节,解析数据采集、三维重建的关键步骤与技术细节,揭开 “从像素到三维” 的实现密码。
基于的高精度三维场景重建的生产流程主要分成四个步骤,包括数据采集、三维重建、引擎集成、VR搭建。其中引擎集成和VR搭建涉及更多的是工程实现。本文重点介绍数据采集、三维重建的过程。
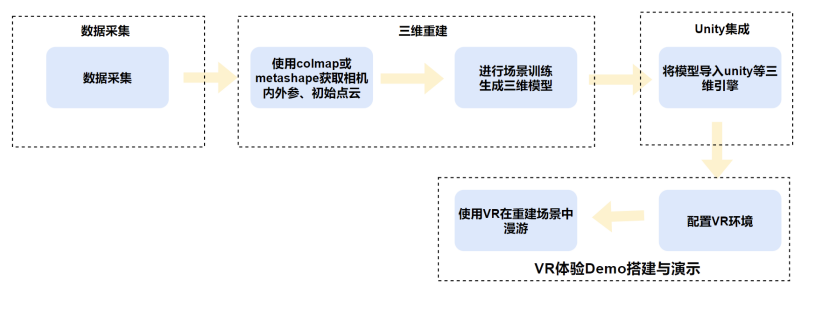
图2 生产流程
1、数据采集
关于采集场景的要求,采集前需对场地进行考察,根据场景制定合理的采集动线路线,应尽量完成场地清场,并对环境整理留出采集动线空间。采集中,避免移动场景中物体,避免移动物体、人等进入采集画面,并且尽量保证环境光照稳定,不可忽明忽暗。
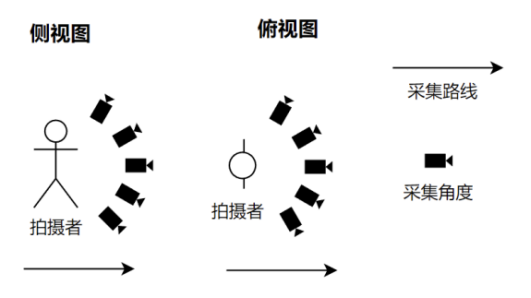
图3 采集角度示意图
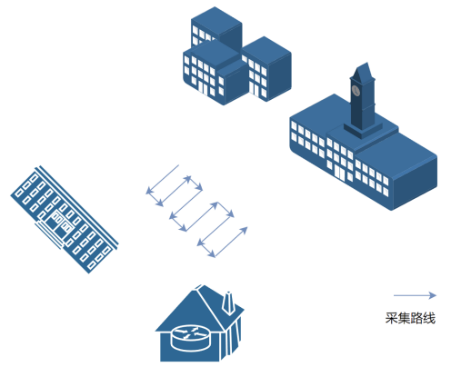
图4 采集路线示意图
为了保证场景重建质量,提升数据采集效率,采用专业采集车进行拍摄采集,采集车是有多台运动相机组成的相机阵列,各个相机的位置分布和朝向设计如图3,采集车的行进方向参考图4采集路线示意图,整体采集车如图5所示,图6是使用专业采集车进行室外拍摄的路线示意图。

图5 专业采集设备示意图
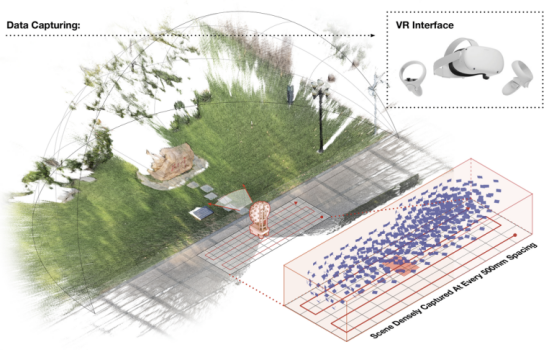
图6 室外采集路线示意图
2、点云生成
点云生成一般通过以下步骤进行。首先对拍摄数据进行预处理,通过图片质量检测,移除模糊图片。之后,通过对应点检索进行相机校准和照片对齐,完成相机位姿计算并获得初始点云。随后进行增量式重建,增量式重建主要利用SfM(Structure From Motion,从运动中恢复结构),SfM是一种从一组不同视角下拍摄的无序或有序影像中,同时恢复场景三维结构和相机姿态的技术。增量式SfM会选择无序影像进行特征匹配,并进行几何纠正、三角测量恢复稀疏点云结构,通过已有点云重新估计相对姿态,再进行局部和全局的BA优化,最后输出全部的相机参数和稀疏三维点云。
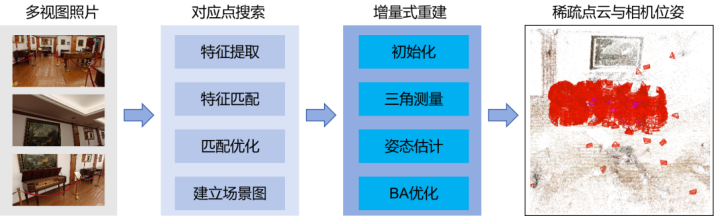
图7 稀疏点云和相机姿态的计算流程
一般在采集照片充足,质量高的情况下,获取的相机位姿和实际采集位置相似,且初始点云形状可明显看出和采集场景一致。下面是厦门钢琴博物馆室内场景的部分拍摄图片,以及计算得到的相机位姿和稀疏模型。
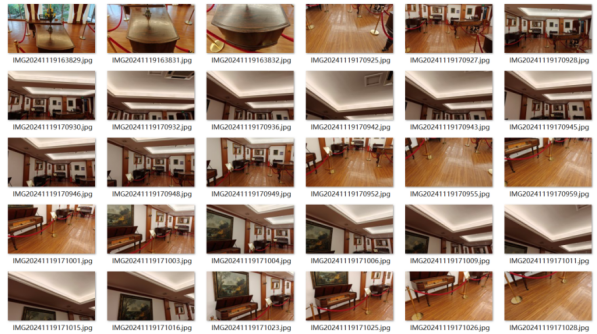
图8 钢琴博物馆的拍摄图片

图9 钢琴博物馆的稀疏点云
如果发现有很多相机位姿发生了漂移或初始点云有明显的异常,则需要重新选择照片或根据异常情况重新补拍照片,然后重新计算相机位姿及初始点云。
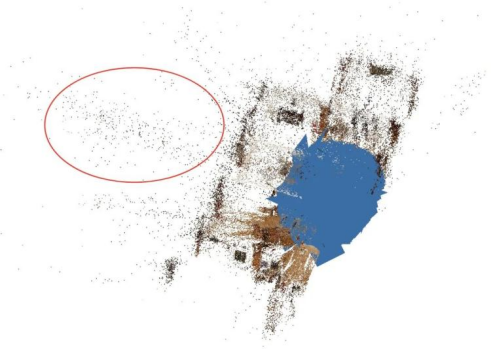
图10 metashape初始点云异常情况
3、光场重建
3DGS三维场景重建的大致流程如图11所示,包括:
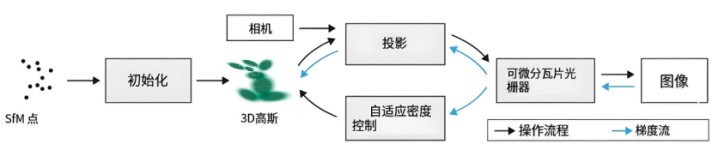
图11 3DGS的基础流程
①输入:输入是一组静态场景的图像,以及通过SfM算法得到的SfM点,以及所有图像对应的相机位姿。
②初始化:对获取的每个稀疏点云创建初始化3D高斯椭球,其由位置(平均值)、协方差矩阵(XYZ轴缩放因子、旋转因子等)、不透明度和球谐函数系数(后文简称SH系数)所定义。该定义允许3D场景合理紧凑的表示,并通过调节参数紧凑化表示精细化场景结构。其中使用球谐函数来映射整个辐射场的方向性外观分量(RGB颜色)。
③构建梯度流迭代优化:3D高斯椭球在对应的相机位姿下进行投影,获取光栅化之后的图像,与真实输入图像(真值图像)进行比对优化,对初始化后的参数(位置、协方差矩阵、SH系数、高斯球密度的自适应控制)进行优化,同时通过自适应密度控制策略对高斯球进行拆分融合操作。图12展示了多个场景的光场重建效果,图13展示了使用MetaQuest VR头显体验6DoF实景漫游。

图12 实景1:1光场重建复刻效果。左上:首钢冰壶馆;左中:咪咕咖啡;左下:首钢咪咕大楼;右上:信息港二期大堂;右中:信息港工区;右下:信息港二期一层休息区

图13 MetaQuest VR头显体验效果图
来源: 中移科协
