
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 3D 传感摄像头能让硬件设备拥有一双感知环境的“智慧之眼”,可以用于人脸识别、手势识别、人体骨架识别、三维测量、环境感知、三维地图重建等。
单目结构光 3D成像技术的深度相机,主要包括一个红外相机、一个红外投影仪以及深度计算处理器。红外投影仪用于向目标场景投射结构光图案(散斑图案),红外相机采集目标的红外结构光图像,深度计算处理器接收红外结构光图像后执行深度计算算法并输出标场景的深度图像。
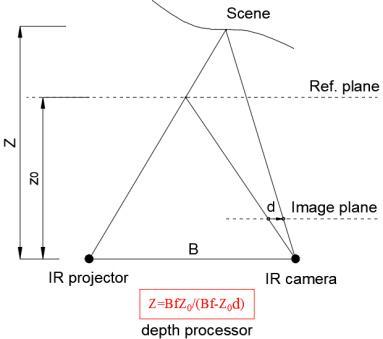
(图像来自网络资源)深度计算处理器在执行深度计算算法时,将预先标定的参考结构光图像与当前采集的红外结构光图像进行匹配计算,以获取图像之间各像素的偏离值(d), 再基于结构光三角法原理由偏离值计算出深度值。
深度相机一般配有SDK包。如ros_astra_camera 是 Astra Pro 深度相机的 ROS SDK 包。
安装好配套软件,执行roslaunch astra_camera astrapro.launch命令启动相机。需要注意启动相机后只是终端模拟器会输出信息,并不会直接出现画面。
查看图像使用 rqt 工具或者 rviz 工具先启动相机,然后继续后面操作
rosrun rqt_image_view rqt_image_view # 启动 rqt_image_viewer 工具
rosrun rviz rviz # 启动 rviz 可视化工具。
各相机型号对应的Launch启动文件如下:
|| ||
有关深度相机的相关术语如下:
有关深度相机的相关术语
|| ||
来源: 来自网络资源
