
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 成信大机器人
成信大机器人 激光雷达在自动驾驶和智能交通中发挥关键作用,实时感知道路上的障碍物、行人和车辆,并提供精确的距离和位置信息。在机器人导航和环境感知方面,激光雷达为机器人提供准确的地图和周围环境信息。
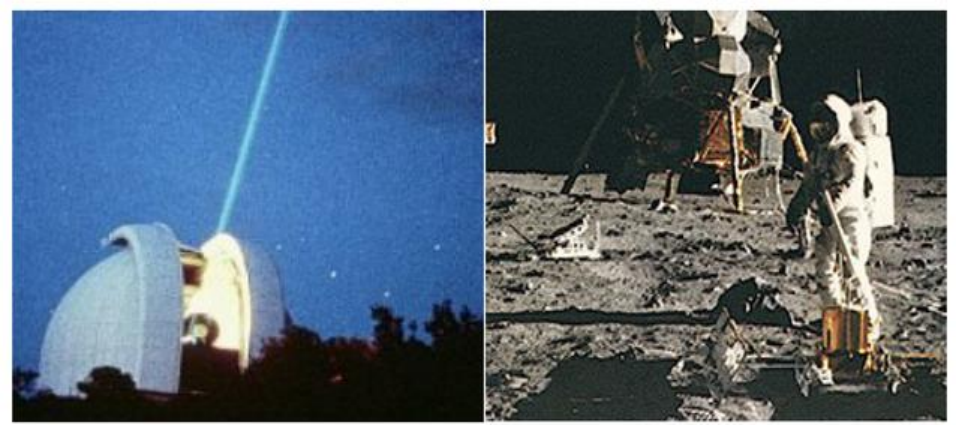
1968年,George D Hickman发明了用于海洋地形测量的激光雷达。1969年,阿波罗 11号带着用于地月测距(Lunar Ranging Experiment)的激光雷达设备登陆月球,人类第一次可以精确测量地球到月球的距离。
激光雷达由激光发射器、接收器和光电探测器、扫描机构和角度解析等组件组成。激光发射器产生激光束,接收器和光电探测器接收反射光信号,扫描机构用于扫描周围环境,角度解析用于确定目标物体的位置。
根据扫描方式,激光雷达从功能上会分为以下几类:
旋转式激光雷达:旋转式激光雷达通过旋转发射器或扫描机构,将激光束在水平方向上进行全方位扫描。
固态激光雷达:固态激光雷达使用固态激光发射器,不需要旋转部件,分为闪光(Flash)式和光学相控阵式。
OPA(相控阵)式激光雷达是典型的“芯片式”激光雷达,具有体积小、功耗低、可靠性高等诸多优势。以波导型光学相控阵为例,其原理是通过控制不同波导之间的相位差改变衍射光干涉增强的方向,进而实现光束的转向和扫描。相较于 Flash 式激光雷达,激光更集中于部分区域甚至一个“点”上,平均功率密度更高,探测距离更远,探测精度更高。
Flash 激光雷达(Flash LiDAR):Flash 激光雷达使用一次性短暂的高功率激光脉冲,将整个场景一次性照亮,然后通过接收器阵列捕获反射的光信号。Flash式激光雷达的原理类似于闪光式相机,在短时间内向待测空间内发射大面积的激光信号,并由灵敏度较高的探测器接收待测目标反射的回波信号,进而实现对待测场景的成像。
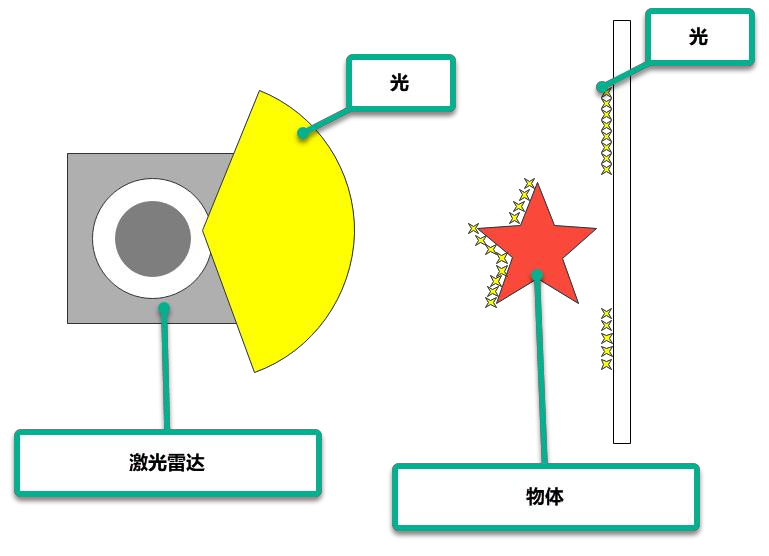
激光雷达发射出光,会照射到物体的表面,当激光雷达接收到物体反射回来的光的时候,就会在光照射到的位置标记出物体的轮廓。
LIDAR测绘技术空载激光扫瞄技术的发展,源自1970年美国国家航空航天局的研发。因全球定位系统及惯性导航系统的发展,使精确的即时定位及姿态确定成为可能。德国Stuttgart大学于1988到1993年间将激光扫描技术与即时定位定姿系统结合,形成空载激光扫描仪。(图片摘自相关资料)
来源: 部分来自于相关资料
