
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 科普中国-重大科技成果解读
科普中国-重大科技成果解读 
随着科学技术的不断发展,人们在海洋探测技术、海洋工程装备研发及海洋资源利用等领域不断深入研究。水下滑翔机就是其中一类海洋装备。2016年,天津大学王树新教授牵头完成“混合驱动水下航行器关键技术与应用”项目获得了国家技术发明奖二等奖。
水下滑翔机,是自治型水下机器人(即AUV)的一种。它之所以能引起科研人员的广泛关注,除了由于其可以适应在高压低温的深海环境下进行无声作业外,还因其具备的独特的超远距离续航能力。在新能源汽车如火如荼的发展情况下,油电混动汽车续航里程可以达到一千公里左右,而体积比汽车小很多的水下滑翔机却能够在海底自由游弋数千公里甚至更远。背后,是无数工程师和科学家的智慧和努力。
要想实现水下滑翔机的长续航能力,科学家们首要想到先从外形设计入手。基于仿生技术,将滑翔机设计为类似“鲸鱼”的细长轴流线型,或者类似“蝠鲼”那样的大翼展,可以有效降低海流产生的阻力;模拟“雨燕”的滑翔、俯冲等飞行动作,优化其自身运动性能。为减轻自身质量,且适应深海高压的作业环境,水下滑翔机多采用低密度、高强度的钛合金材料。再通过优化耐压壳体的形状,比如将常规的圆柱形壳体之间的肋板,调整为弓形或其他形状,以便能提高壳体的耐压性能。或者采用碳化硅陶瓷等新型材料,降低耐压壳的重量。
其次,降低功耗。水下滑翔机长时间工作在复杂的深海环境中,进行大规模的观测与探测活动,其表面和内部布满了大大小小的传感器。随着小型低能耗传感器及其集成技术的发展成熟,这些传感器不仅可以在低功率的情况下工作,还可以通过制定专门的智能节能策略,让某些传感器间歇性工作。
在动力驱动方面,水下滑翔机巧妙地采用了浮力驱动技术和温差驱动技术。浮力驱动系统的原理是利用液压泵或活塞调节外部油囊膨胀的体积,从而调节并精准控制水下滑翔机的净浮力,确保其在水下运行时保持稳定的深度,其动力通常是自带的电池。而温差驱动是借助海洋中的温度差,如某海域的不同深度或温跃层,利用固-液相变材料(如正十六烷)的热胀冷缩特性,实现海洋温差能的捕获。滑翔机在水中浮潜过程中,随着深度变化,环境温度在3℃至25℃之间变化,相变材料在此温度范围内,可以实现固态与液态之间的转变,改变体积,从而将热能转化为机械能或电能,以实现浮力驱动。这项技术的发展可以让水下滑翔机摆脱自身携带电池能量的限制。

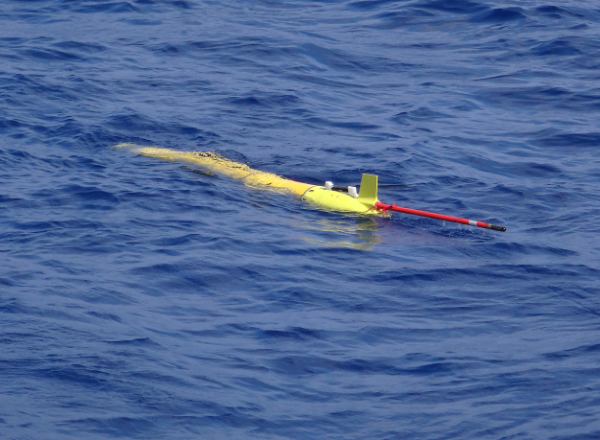
我国的水下滑翔机相较于国外来说起步相对较晚,但发展迅速,其中,由天津大学自主研发的“海燕”谱系化水下滑翔机较为典型。“海燕”水下滑翔机的研制始于2002年,经历了20多年的研制、改型、优化。其中,一款名为“海燕-X”的水下滑翔机,于2018-2020年在马里亚纳海沟进行了大深度海试,最大下潜深度达到了10619米。另一款长航程型号“海燕-L”也很有特色,其在2020年进行的海上试验中,从马里亚纳海沟附近布放,直到次年才在南海附近海域回收,航行距离达到了5506公里。到当时位置,该型号的最长续航时间已经超过了300天,意味着接近一年的水下作业时间。
水下滑翔机的研发不仅仅让我们看到了科学家和工程师的智慧和努力,还见证了中国在海洋领域取得的成就。未来可以期待有更多新颖的技术可以涌现出来,并将其应用到水下滑翔机领域中去,继续推动我国对海洋领域的探索和利用,为人类社会事业做贡献。
撰文:宋婷婷,上海彩虹鱼深海科普基地主任
审稿专家:祝叶华,科技导报社副编审、清华大学博士
编辑:陈雨薇(实习)
中国科协科普部
新华网
联合出品
来源: 新华科普-科技前沿大师谈
内容资源由项目单位提供

