
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 磁悬浮中国
磁悬浮中国 
张和洪 福州大学 计算机与大数据学院,福建 福州 350108
前言
在当今日益拥挤和迅速发展的城市交通环境下,磁悬浮列车作为一种先进的现代交通工具,凭借其速递快、摩擦损耗小、低能耗以及维护成本低等优势,受到广泛的关注与研究[1]。如图 1所示,目前我国已经在上海、长沙、北京等地区建成了城市磁悬浮列车线路,涉及中低速、高速等类型的磁浮线路。在磁悬浮列车技术方面,我国在高速运行、安全稳定性以及基础设施建设等方面积累了丰富的经验。然而,要实现技术的真正突破和持续发展,仍然面临一系列的挑战。磁悬浮列车的悬浮技术是其运行的核心和基础,直接关系到列车的稳定性、安全性和舒适性。因此,悬浮技术的进一步创新和提升成为当前发展的焦点。

(1)上海 (2)长沙 (3)北京
图 1 磁悬浮列车城市商业化运营线路
悬浮系统作为磁浮列车的核心子系统,在列车平稳悬浮以及高效运行方面发挥着至关重要的作用。该系统通过磁力和电磁感应实现列车与轨道之间的非接触悬浮,从而减少与轨道之间的摩擦力,使得磁浮列车能够在高速状态下几乎无摩擦地行驶。磁浮列车悬浮系统工作原理如图 2所示,列车的悬浮过程涉及到多个关键组件的协同作用:首先,位于车身下方的高精度传感器将实时采集到的间隙信号等信息传输给悬浮控制器;其次,悬浮控制器计算所需的电流值并通过放大电路将电流加载到电磁铁;最后,电磁铁内部的线圈受到电流作用,其产生的磁场与轨道上的导电材料相互作用,从而形成一个向上的电磁力,使列车悬浮于轨道。通过精确控制电流的强度和方向,可以在列车和轨道之间产生稳定的电磁力,从而保持列车在额定的间隙运行。
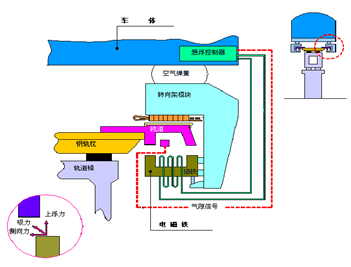
图 2 磁浮列车悬浮系统结构图
磁浮列车的每节车厢包含多个悬浮点,每个悬浮点呈矩形分布于车厢底部,通过转向架结构实现一定程度上的解耦,使得悬浮点彼此之间影响较小。故在设计悬浮控制器的过程中,通常以单点悬浮系统作为基本对象进行建模和控制,该系统的具体模型如图 3所示。
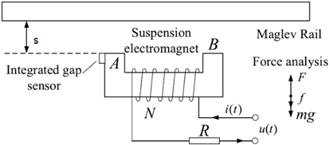
图 3 单点悬浮系统模型图
悬浮控制器控制能力的要求
在实际运行中,磁浮列车的悬浮系统面临着两方面的技术挑战。首先,需要实现对间隙信号的精准采集与处理,以准确衡量列车与轨道之间的间隙。其次,悬浮系统必须具备强大的抗干扰能力,以应对内部和外部扰动对系统综合控制品质与列车运行性能的影响。
1)信号有效提取能力
一方面,由于磁浮列车的高速运行环境以及复杂的运行工况,传感器对间隙的采集易受到噪声干扰,噪声来源包括气候、温度、机械振动、轨道地形等。为了克服这些因素带来的问题,传感器和测量系统通常需要采用抗干扰技术,包括滤波器、噪声补偿算法和高精度传感器设计,以提高测量精度。目前我国磁悬浮控制系统整体框架仍然采用以PID(比例-积分-微分)为核心的误差纠正控制策略。该方法对信号的处理较为“粗糙”,在处理复杂噪声环境下的信号处理问题上存在一定的局限性。如何在外部干扰频繁且快速变化的工况下提取有效间隙等信号,是提高控制品质的前提。
2)抗干扰能力
另一方面,磁浮列车悬浮系统属于非最小相位系统,该系统具有显著的非线性特性,系统内部存在动力学和电磁学的高度耦合,易受到多源扰动的影响导致系统参数发生改变,进一步增加了系统模型的复杂性。基于这些特性,同时还需要满足磁浮列车运行的稳定性以及乘客的舒适性,这对于控制器的抗扰动性能要求极高。传统控制器在靠近平衡点时通常能够提供较好的控制品质,但一旦系统偏离平衡点,其性能以及抗干扰能力显著下降。如何在众多扰动源对被控系统产生影响前进行估计和反馈补偿,形成一种多源扰动实时动态观测方法并解决内/外部扰动问题,是控制性能的关键。
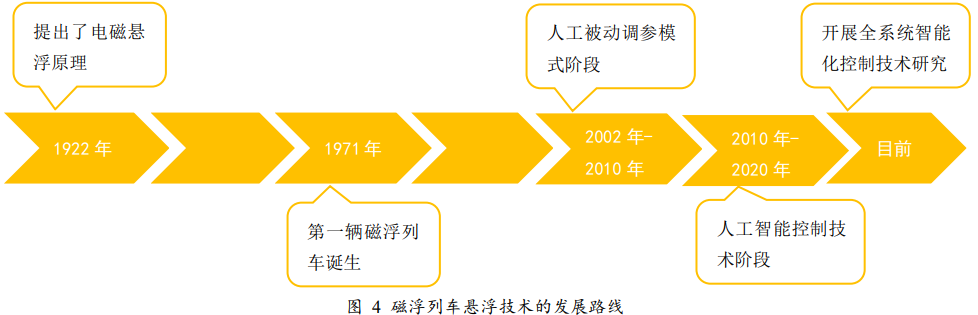
磁悬浮列车悬浮技术发展演变
如图 4所示,自首次提出磁悬浮原理开始,磁悬浮技术的研究和探索至今已经历100多年。
国内外磁悬浮研究现状
1922年,德国首次系统提出了电磁悬浮原理,并于1934年获得了世界上第一个有关磁悬浮技术的专利[2]。随后在1971年,德国MBB飞机公司完成了速度为90km/h的第一辆磁悬浮原理车TR01,并建设了一条长660m的试验线,将其投入试验运行[3]。1976年,德国展示了以长定子线性电机为原理的TR系列载人磁悬浮列车。在之后的几十年里,德国持续进行了该类型磁悬浮列车的研制工作[4]。
日本自1970年开始研究磁悬浮技术,而在1979年,日本国铁(Japanese National Railway,JNR)研制的ML500试验车在宫崎试验线上创造了空载速度达到517km/h的世界纪录[5]。2003年,经过改进的新型试验车MLX01-901的试验速度达到了581km/h,再次刷新了地面交通工具的最高试验速度记录[6]。在2015年,L0型磁悬浮列车实现了载人603km/h的试验速度,这一成就创下了有车厢车辆的最高陆地速度纪录[7]。
在20世纪60年代,美国麻省理工学院的研究人员提出了建设真空管道磁悬浮线路的设想。自2003年以来,美国铁路员工Swartzwelte提出了美国地铁的思路,即在美国建设真空管道磁悬浮地铁系统,以实现城市之间的直线连接,旨在形成畅通无阻的地下交通网络。2017年,HyperloopOne首次在真空环境中全面测试其超级高铁技术。他们利用电动磁悬浮技术,在内华达沙漠搭建了长达500米的真空管道试验线,并成功实现了最高时速310km/h的运行速度[8]。
中国上海自2000年引进了德国的磁悬浮铁路技术。到了2002年12月底,上海磁悬浮铁路的单线正式通车运营。而到2003年底,双线工程也完成,使得该线路的总长度达到了30公里,这是我国第一条商业运营的高速磁悬浮铁路[9]。2004年1月,西南交通大学组织召开了“超高速高温超导磁悬浮车系统”方案论证会,并提出了速度超过600km/h的载人超高速真空管道高温超导磁悬浮系统方案[10]。在2014年6月,全球首个真空管道超高速磁悬浮列车环形试验线系统Super-Maglev建成,并实现了在0.029个标准大气压下连续运行10小时的记录[12]。目前,我国在中低速领域和高速领域都已成功实现了磁悬浮列车的商业运营,然而在关键悬浮控制技术以及列车抗干扰性能的研究上,依然有巨大的提升潜力,因此如何加快突破当前的技术瓶颈是科研人员亟需解决的问题。
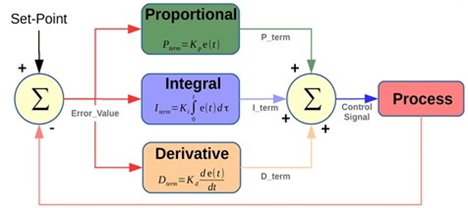
图 5 PID控制器结构框图
人工被动调参控制模式
直至目前,悬浮控制器仍以PID为主(其结构如图 5所示),其原理简单且易于实施[11],但随着受控对象的变化或工况的改变,控制器参数需要不断重新校准,这种控制策略仅适用于单一工况下。无法满足复杂工况下的高性能信号跟踪、控制参数自主优化、自适应、抗内部/外部扰动能力、快速响应能力等悬浮系统控制问题。自我国研究磁悬浮列车以来,许多学者将新型控制策略应用于悬浮系统中,如鲁棒控制、滑模控制、模糊控制等。这类控制器本质上还是沿用以往的操作经验对控制器参数进行人工调整和对控制模式进行人工切换。
人工智能控制模式
随着机器学习浪潮的持续推进,强化学习成为了悬浮控制领域的一项备受关注的技术。强化学习以其在复杂环境下自主学习和优化控制策略的能力而闻名。在磁浮列车悬浮系统中,引入强化学习可以为控制器提供更高的自主性和适应性。通过将强化学习算法与磁浮列车悬浮系统集成,可以不断地学习和优化控制策略,以应对不同工况和扰动源的变化[13]-[16]。然而该方法虽然减少了人工调参的需求,但是其带来的不确定性和不稳定性仍是一大问题,现该模式还处于理论阶段。
智能化自抗扰控制模式
在众多扰动源对被控系统产生影响之前,通过观测、估计和消除这些扰动源,是有效提升磁浮列车悬浮系统控制品质的关键。
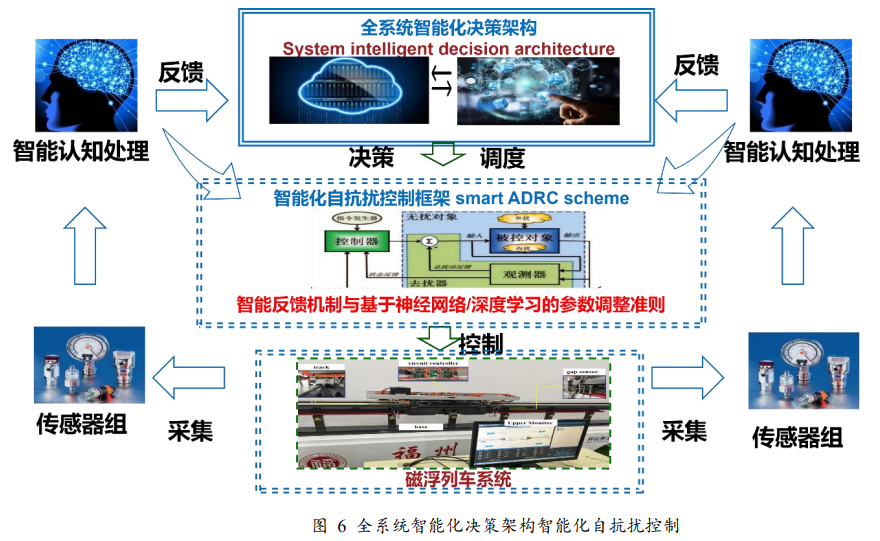
首先悬浮系统采用自抗扰控制(ADRC)技术作为基础,构建了能够同时实现测量噪声抑制、内部/外部扰动观测与抑制的主体控制框架。这个控制框架可以被视为给悬浮系统装上强大的ADRC控制器“心脏”,从而明显提升了其控制能力,相对于传统的PID控制架构,有了显著的改进。基于扩张状态观测器的自抗扰控制架构主要包括以下三个部分:1)扩张状态观测器(ESO),ESO的作用是估计系统的状态,并根据观测的扰动对系统做出反馈补偿,从而实时地校准系统的状态;2)跟踪微分器(TD),TD用于对信号的跟踪以及微分信号的提取,其能够从夹杂噪声的信号中有效跟踪原始信号,并且保持良好的微分品质;3)状态误差反馈(SEF)控制器,SEF控制器通过引入状态误差反馈,对系统状态进行调整,以实现更精确的控制[17][18]。其核心思想是通过ESO将不确定的实际受扰对象动态转化为近似确定的积分串联型系统,并通过控制器实施精确控制[19]。
其次,为了实现高性能控制品质并满足自主调参的需求,控制器本身应具备多项智能特征,包括环境信息感知、自适应调整、自主学习和自主决策等。这种智能自抗扰控制模式如图 6所示。与传统控制模式相比,这种控制器显著增强了现有悬浮系统的控制品质。这个阶段可以被定义为磁浮列车悬浮控制器的智能化设计阶段。
悬浮系统智能控制发展目标
结合当前磁浮列车悬浮系统控制技术的应用需求和发展现状,后续的发展将以智能化自抗扰控制为主要目标。针对这个目标,我们将制订一项分步实施的、逐个突破的技术研究计划。这一计划将有助于推动磁浮列车悬浮技术的不断创新与进步,以满足列车在复杂工况下的稳定悬浮需求。
首先建立一个强抗扰和强适应的控制架构,将传统的PID控制模式改造为主动抗扰控制模式。在这个步骤中,我们计划构建一个多自由度的主动抗扰控制体系,其中包括噪声抑制、扰动观测与补偿、以及状态快速响应。这一体系将使得控制器的性能相比目前的PID控制方法有着更好的鲁棒性和适应性,从而满足日益复杂工况的需求。
其次是为主动抗扰控制架构添加智能元素,使控制器具备环境信息感知和自适应调整的能力。在这一阶段,控制系统将借助智能认知算法来提取更全面、有用的信息。系统将具备以下能力:信息感知、多源扰动的实时动态观测、自适应控制以及自主调参等。这些能力将使控制系统更加智能化,从而提高控制器的性能并适应多变的工况环境。
结束语
磁浮列车悬浮技术的发展需要不断地深入研究,未来悬浮技术将不仅仅满足列车的平稳悬浮和基本运行,还需要应对更多挑战。因此,磁浮列车的悬浮控制器将需要更强的抗扰能力、适应能力、自主调参能力和自主决策能力。随着数字化和智能化技术的快速发展,悬浮技术也将朝着信息驱动的主动抗扰控制和智能化控制方向发展。本文提出的具备多项智能特征的新型控制技术能够满足时代发展的要求,对于推动控制器局部智能化的发展具有非常重要的意义。
参考文献
[1] 罗炜宁,王强.磁悬浮列车未来发展与展望[J].硅谷,2013(5):2.DOI:10.3969/j.issn.1671-7597.2013.05.004.
[2] 张延昭.德国磁悬浮列车研究概况[J].国际科技交流, 1993(4):4.DOI:CNKI:SUN:QQKL.0.1993-04-003.
[3] Dickman S .TRANSPORT - GERMANSDEBATE MAGLEV TRAIN[J].Nature, 1989:584-584.
[4] 熊嘉阳,邓自刚.高速磁悬浮轨道交通研究进展[J].交通运输工程学报, 2021, 21(1):22.DOI:10.19818/j.cnki.1671-1637.2021.01.008.
[5] Saijo T , Koike S , Tadakuma S.Characteristics of Linear Synchronous Motor Drive Cycloconverter for MaglevVehicle ML-500 at Miyazaki Test Track[J].IEEE Transactions on IndustryApplications, 1981, IA-17(5):533-543.DOI:10.1109/TIA.1981.4503994.
[6] Kusada S , Igarashi M , NemotoK ,et al.The Project Overview of the HTS Magnet for SuperconductingMaglev[J].IEEE Transactions on Applied Superconductivity, 2007,17(2):2111-2116.DOI:10.1109/TASC.2007.899691.
[7] KOEI T. Central Japan RailwayCompany[C]//2016-03-30)[2020-09-15]. http://English. Jr-central. Co.jp/compa-ny/ir/investor-meeting/_pdf/im_2016_03. Pdf.
[8] 苏靖棋.超级高铁(Hyperloop)可行性分析[J].现代城市轨道交通, 2020(5):5.DOI:CNKI:SUN:XDGD.0.2020-05-027.
[9] Chen X, Tang F, Huang Z, et al.High-speed maglev noise impacts on residents: A case study in Shanghai[J].Transportation Research Part D: Transport and Environment, 2007, 12(6):437-448.
[10] 沈志云.关于我国发展真空管道高速交通的思考[J].西南交通大学学报,2005(2):133-137.DOI:10.3969/j.issn.0258-2724.2005.02.001.
[11] Ang K H, Chong G, Li Y. PID control system analysis, design, andtechnology[J]. IEEE transactions on control systems technology, 2005, 13(4):559-576.
[12] Deng Z , Zhang W , Zheng J ,et al.A High-Temperature SuperconductingMaglev Ring Test Line Developed in Chengdu, China[J].IEEE Transactions onApplied Superconductivity, 2016, 26(6):1-8.DOI:10.1109/TASC.2016.2555921..
[13] Zhao F, You K, Song S, et al. Suspension regulation ofmedium-low-speed maglev trains via deep reinforcement learning[J]. IEEETransactions on Artificial Intelligence, 2021, 2(4): 341-351.
[14] Zhao F, Jiang P, You K, et al. Setpoint tracking for the suspensionsystem of medium-speed maglev trains via reinforcement learning[C]//2019 IEEE15th International Conference on Control and Automation (ICCA). IEEE, 2019:1620-1625.
[15] Sun Y, Xu J, Chen C, et al. Reinforcement learning-based optimaltracking control for levitation system of maglev vehicle with input timedelay[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-13.
[16] Sun Y, Xu J, Wu H, et al. Deep learning based semi-supervisedcontrol for vertical security of maglev vehicle with guaranteed boundedairgap[J]. IEEE Transactions on Intelligent Transportation Systems, 2021,22(7): 4431-4442.
[17] 韩京清.自抗扰控制技术[J].前沿科学,2007.DOI:CNKI:SUN:QYKX.0.2007-01-004.
[18] 韩京清.从PID技术到"自抗扰控制"技术[J].控制工程, 2002,9(3):6.DOI:10.3969/j.issn.1671-7848.2002.03.003.
[19] 高志强.自抗扰控制思想探究[J].控制理论与应用,2013(12):13.DOI:10.7641/CTA.2013.31087.
来源: 磁悬浮中国
