
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中国宇航学会
中国宇航学会 想象一下,未来的某一天。航天员穿着定制的航天服,在火星上行走,呼吸着火星大气生成的氧气。外形像鸟一样的充气式飞行器在金星的天空中飞行,探测金星的大气成分和气象模式……
这简直就像是科幻作品里的情节,但这种场景或许在不远的将来就会实现。2022年2月,美国国家航空航天局在其官网发布了本年度创新先进概念计划的遴选结果,共有18个项目入选。本文选取了其中9个与深空探测领域密切相关的创新方案进行简要说明,涉及小行星防御、原位资源利用、生命支持、采样返回、自主探测器等,希望能给大家带来一些启发。
人类终端防御系统
据报道,直径大于1千米的小行星撞击地球后会使地球发生巨大爆炸并触发海啸,人类将面临灭绝的威胁。6500万年前,一个直径10千米的小行星撞击墨西哥尤卡坦半岛海岸曾导致了恐龙等地球上近75%的物种灭绝。1908年和2013年,俄罗斯西伯利亚的通古斯和车里雅宾斯克分别发生了陨石爆炸事件,造成8000万树木被摧毁、1000多人受伤。针对小行星可能带来的危害,世界各国都开展了相关研究,提出了一系列主动防御计划。目前来看,小行星主动防御的主要方式有三种:一种是动能撞击改变小行星轨道,例如美国的深空撞击计划和双小行星改道测试计划(DART);一种是利用长期作用力改变小行星轨道,例如太空拖船;还有一种是采用核爆方案。
菲利普·鲁宾加州大学提出了一种基于现有技术实现的行星防御方案,通过在太空中部署一系列小型超高速动能穿透器,来粉碎和分解小行星或小彗星,从而保护地球不受小行星影响。采用这种方案可有效防御直径数百米的小行星,但其防御效果主要取决于拦截小行星所需的时间和小行星的大小。据科学家估计,人类终端防御系统只需要在撞击前5个小时,就能摧毁通古斯事件中同等大小的小行星(直径50米,爆炸威力约为1000兆吨)。而较大的目标如阿波菲斯这种大型行星(直径370米),也可以在撞击前10天实现拦截。如果预先将该系统部署到轨道或月球基地,那么该系统的响应时间会更短。
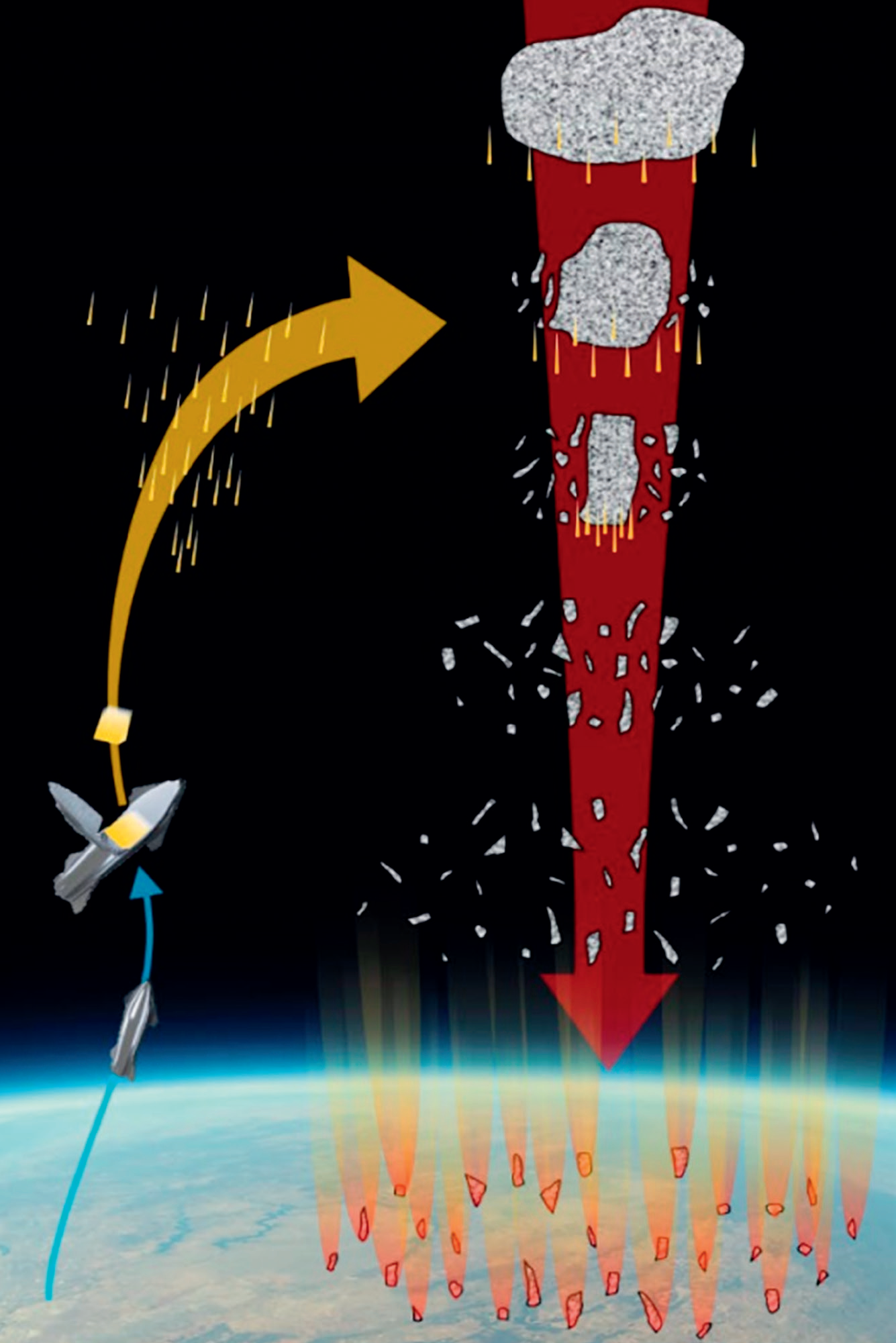
小行星防御方案示意图
小行星主动防御是人类应对行星和彗星撞击的一种有效手段,也使人类第一次真正具备了应对小行星威胁的自主能力。
金星大气/云粒子采样返回
麻省理工学院天文学家提出了一种新的航天器设计方案,用于执行金星采样返回任务,以评估金星大气云区域的可居住性,寻找生命的迹象。
几十年来,人们通过金星的温带云层推测它是一个宜居星球。尽管金星云层含水量极低并存在浓硫酸,但长期以来无法解释的大气测量以及新的发现,都支持了金星可能存在微生物的这一观点,但天体生物学研究并非本项目研究的重点。
该方案中的飞行系统由入轨探测器和轨道飞行器组成。入轨探测器由一个可变高度的气球组成,在45~60千米的高度上工作。气球的吊舱包含采样设备和上升飞行器。在完成从不同的大气层位置采样后,空中平台将上升到大约70千米的高度,上升飞行器启动并与轨道飞行器会合,随后采样返回。该方案支持了美国国家航空航天局通过新的科学发现拓展人类认知的目标,以及“推动科学、技术和空间探索的进步,以拓展人类认知”的使命。
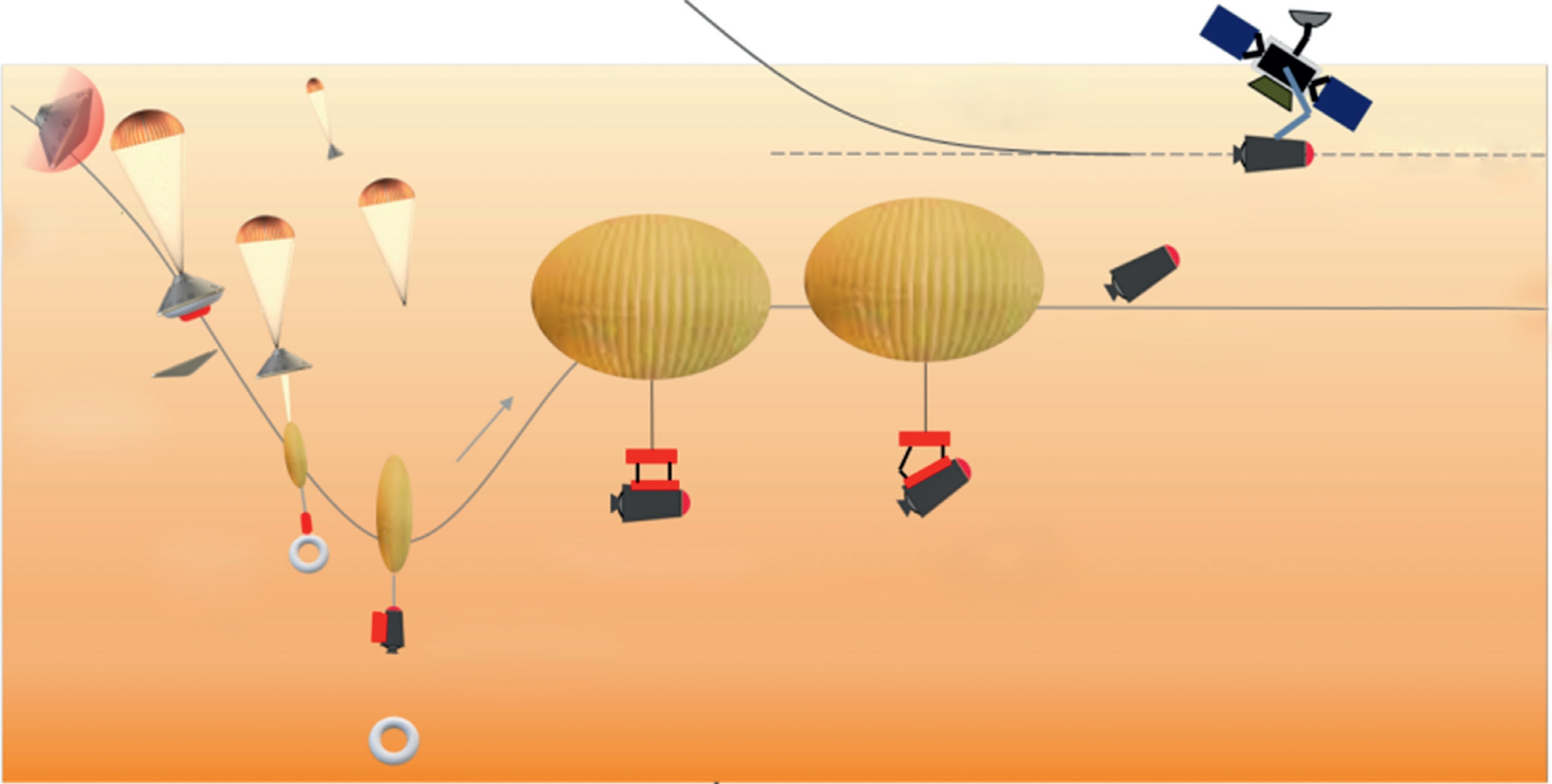
金星采样返回方案示意图
“定制”火星探索航天服
舱外航天服可被认为是人形的“宇宙飞船”,保护航天员不受宇宙空间恶劣环境的影响,为航天员提供一个赖以生存的微环境。但由于各种原因,并不是所有的航天服都能发挥其作用,许多机组人员经历了肩伤、指甲脱落等问题。因此,定制航天服成为解决不同机组人员所面临的问题的一种有效途径。但是如何能够快速、有效地做到这一点呢?来自得克萨斯农工大学的研究人员给出了答案。他们正在研究制造低成本、高性能火星探索定制航天服的可行性,通过数字人体扫描、数字设计/分析、机器人制造,最终形成数字化模型,为未来航天服的研制提供基础。
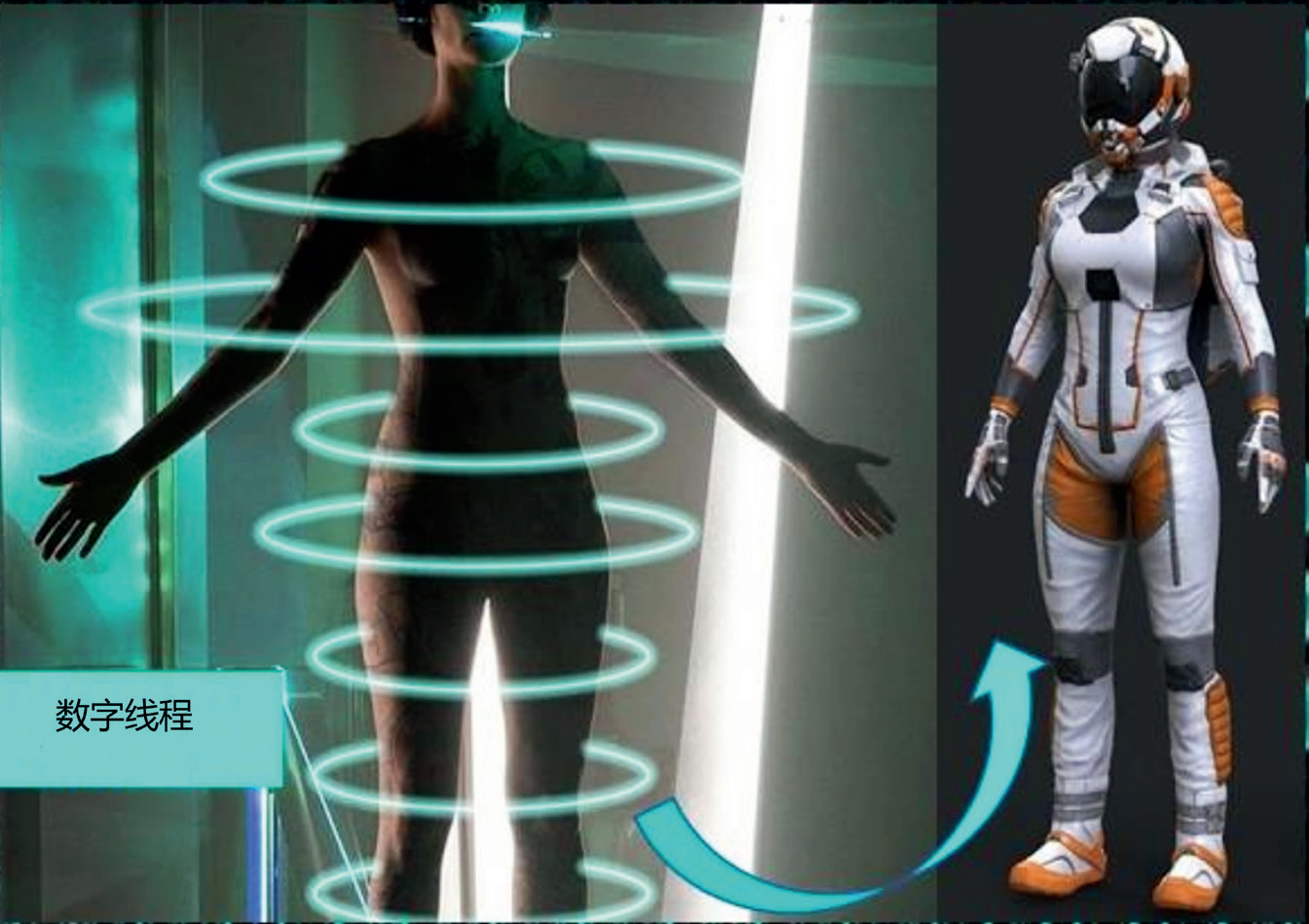
火星探索航天服示意图
该项目旨在解决深空探索面临的几个主要问题:1.根据不同航天员的个体差异,快速设计、制造舱外活动航天服的能力;2.建立数字孪生系统,并根据经验教训,不断优化完善航天服设计的能力;3.深空探索人员可根据数字文件在原地制造或修复某些舱外航天服组件;4.实现航天服数字化纳入整个火星任务构架和操作方案中,包括再补给、原地修复和制造以及原材料的再利用。
火星固定、便携式制氧机
人类火星任务的关键挑战之一就是原位资源利用(ISRU)技术,以解决长时间火星探索无法立即获得补给的问题。特别是氧气——既是火星上升飞行器(MAV)的推进剂,也是维持生命的必要资源。亚利桑那州立大学提出的制氧机方案,主要利用所谓的变温吸附/解吸(TSSD)过程,以火星大气为原料来生产氧气,与现有技术相比,生成相等量的氧气,可以降低10倍能耗。

便携式制氧机工作原理
2021年4月,美国国家航空航天局在毅力号火星车上进行了“火星氧气原位资源利用实验”(MOXIE),首次成功制造出5.37克氧气,相当于火星上的航天员呼吸10分钟所需要的氧气量。预计采用这种技术每小时可以制造10克以下的氧气,在理论上每小时至多可生产12克氧气。MOXIE的工作原理是从二氧化碳分子中将氧原子分离出来。分离后产生的废物——一氧化碳,则被排放到火星大气中。
与MOXIE技术相比,TSSD技术在效率、能耗、鲁棒性、灵活性等方面都具有优势。效率方面,采用TSSD技术生成氧气的效率比MOXIE技术预计高10倍。对于MOXIE技术来说,生产氧气推进剂的功率至少需要30千瓦,而TSSD只需要4千瓦。灵活性方面,TSSD的启动时间仅为几分钟(MOXIE为几小时),并且能够处理间歇和重启等情况。鲁棒性方面,TSSD技术简单,价格低廉,无旋转部件,使用寿命长,并且不容易产生积碳。这两种技术都需要能量的转化来实现氧气制备,TSSD技术转化温度为260℃左右,MOXIE技术转化所需温度约为800℃,因此对于仪器耐热材料也提出了更高的要求。如果方案可行,那么TSSD将大幅提升火星原位资源利用能力,显著降低人类火星探索的风险,可以让火星任务的着陆区选址更具灵活性。
外行星探索科学方案
由于成本高昂、技术难度大等,人类对于外太阳系的探索极为有限:在过去60多年的太空探索中,土星以外的天体仅被到访过一次。最近的研究表明太阳帆推进每年可实现10AU,那么,利用太阳帆推进,人类将不到2年就可到达海王星,不到3年就可到达冥王星,这在当今的推进技术中也是前所未有的。
太阳帆为深空探索提供了一种全新的方案,为低成本和快速运输任务铺平了道路。基于太阳帆推进的思路,美国国家航空航天局戈达德航天飞行中心提出了一个突破性的航天器架构,它将科学仪器和航天器集成到一起,通过直接在太阳帆材料上打印基于量子点的光谱仪,从而解决了过去因质量限制无法实现的载荷功能。与仅用于小型立方体卫星推进的传统太阳帆不同,该航天器架构方案将其广阔的区域用于光谱学,几个航天器架构同步工作将大大缩短飞行时间,拓展外太阳系科学探索的边界。

外行星探索方案示意图
用于极端环境和区域探索的仿生鳐鱼
用于极端环境和区域探索的仿生鳐鱼(BREEZE)项目是在2019年美国国家航空航天局创新计划资助下开展的,由布法罗大学研究人员提出,旨在设计并建造一种多功能航天器来开展金星大气层探测。
该飞行器将充气结构与仿生运动学相结合,机翼可以像鳐鱼的胸鳍一样拍动,从而产生升力。该设计可以有效利用行星大气中的强风,同时为飞行器提供较好的控制能力。BREEZE将在海拔50~60千米的大气层中飞行,每4~6天对金星进行一次环绕,以太阳能为动力,开展金星的天气模式、大气成分、金星磁场图绘制等相关研究。
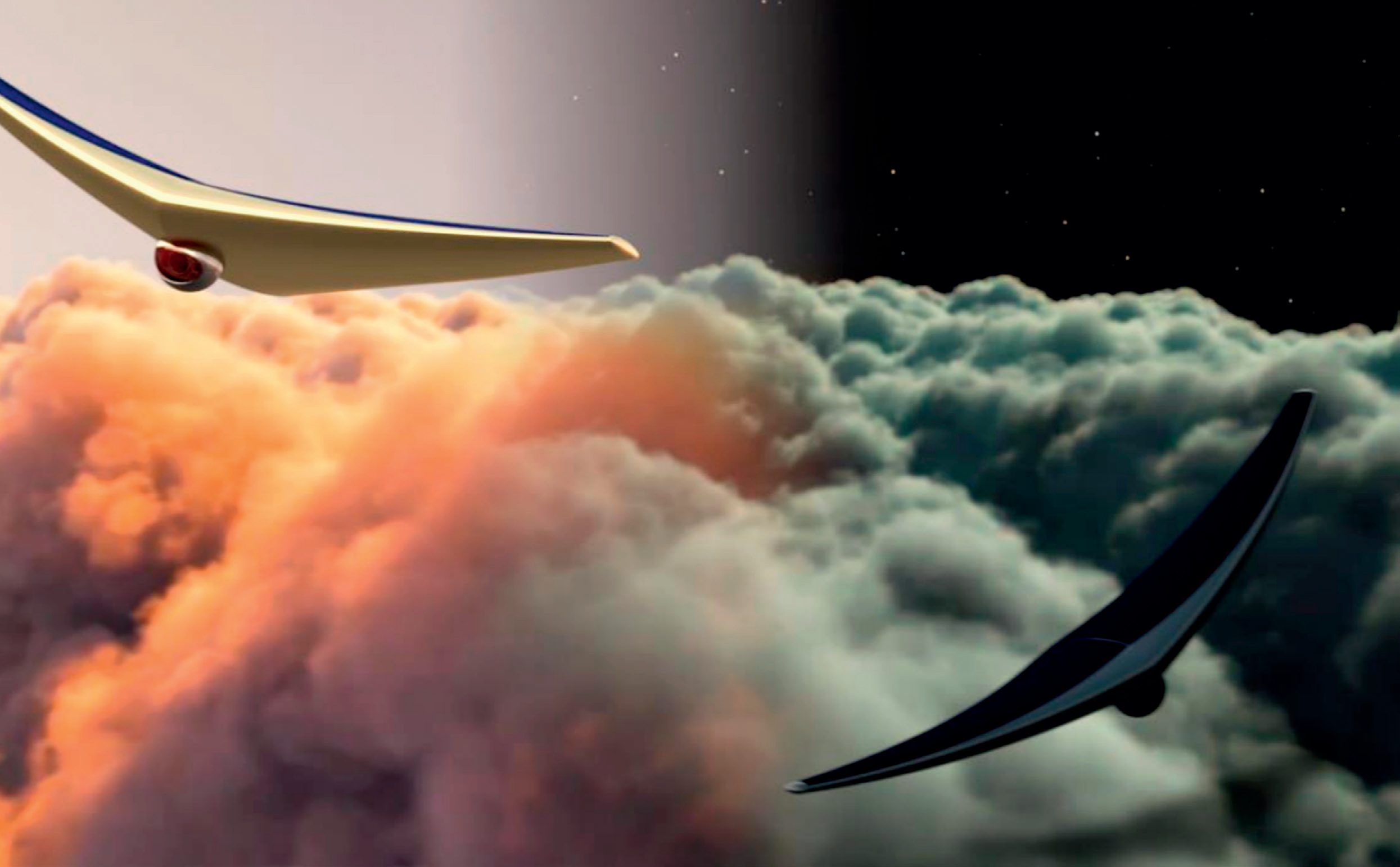
仿生鳐鱼方案概念图
项目第一阶段启用了BREEZE结构、空气动力学、稳定性和充气的初步计算研究,使技术成熟度(TRL)从1级(基础理论研究阶段)提升到2级(技术方案应用初级阶段)。第二阶段任务将验证其可行性,技术成熟度将达到4级(实验室环境下样本生产测试阶段)。第一个测试将是使用先进的运动捕捉技术评估机翼的运动范围和扑动速度,确定BREEZE的机动能力,为风洞试验奠定基础。之后,基于物理数据开展试验,以获得空气动力和力矩,用于校准和验证计算流体力学结果,从而验证系统的推进和控制能力。
最终通过缩比模型试验来评估BREEZE的主动控制能力。除了金星,BREEZE还可以探测具有稠密大气层的其他天体(如土卫六),为美国国家航空航天局后续开展行星探索提供了一种低成本、低风险的解决方案。
千米级可折叠空间结构
长时间太空飞行会对人体构成严峻挑战,从骨骼退化到肌肉损失再到脑结构改变等,这些都与重力不足有关。因此,人类想要长久地在太空生活下去,就需要创造人造重力环境。
2021年,卡内基梅隆大学在美国国家航空航天局创新先进概念计划下提出了一种通过千米级的空间结构自旋产生离心力来实现人工重力的方案。该方案以阿尔忒弥斯计划下的月球轨道门户为应用背景,利用机械性能出众的轻质超材料,实现伸缩比达到150倍或者更高的结构折叠技术,从而使这种千米级的结构部件可成功安装在火箭的整流罩内进行发射。
卡内基梅隆大学通过第一阶段的研究已经证明了这种方法的可行性,第二阶段将聚焦以下4个具体方向:1.对结构展开“动特性”进行建模。2.利用仿真手段和设计优化,解决在存在制造误差和外部干扰时,结构展开而面临的一系列问题。3.通过快速原型设计并不断迭代,实现模型校准和子系统组件评估。4.对具有数千条链路的米级原型进行试验,以验证无干扰的展开和高扩展率。第二阶段的工作将持续两年,如果该想法能够实现,将对美国国家航空航天局未来星际探索产生直接和长期的影响。在短期内,千米级的空间结构将使人类在月球空间的持续居住成为可能。从中长期来看,这种结构对人类长时间太空生存至关重要。
小型攀爬机器人
面对火星复杂的地表现象,传统的轮式探测器的探测范围有限,有些区域无法达到。因此,美国国家航空航天局开始思考无法到达区域(如悬崖峭壁)该如何探测。斯坦福大学研究人员正在尝试解开美国国家航空航天局的疑惑。他们正在开发一种任务架构,包括一个远程爬行机器人、锚定位置的机器人,可以使用延伸吊杆进行移动操作,在火星洞穴复杂地形中探索采样。
在火星或月球的重力作用下攀爬时,爬行机器人必须抓住锚点来移动和操纵物体,才不会漂浮或坠落。这种机器人是一种高度可重构机械装置,汇集了自主机器人、机器人操作、机械设计、仿生抓取和地质行星科学领域的跨学科专家团队的智慧。

小型攀爬机器人示意图
项目第一阶段,专家团队研究了小型攀爬机器人洞穴探索任务的可行性,发现这款洞穴机器人可达空间和扳手工作空间更加广泛;带有多爪、轻质抓取器的解决方案可实现岩石表面的成功抓取。此外,由于攀爬机器人的强机动性和操纵性,可实现对重要科学目标的探索。在第二阶段,专家团队将在完善第一阶段可行性研究的基础上,重点解决系统鲁棒性和端到端方案验证问题,包括拓展攀爬机器人的工作空间;确定抓取器容易成功抓取的洞穴地点,解决其他机器人在洞穴探索时遇到的导航局限性问题;研究降低任务风险的途径,如研制控制器来降低机器人抓取失败所导致的振动影响;研究机器人在现实任务环境中的性能。
探测海洋星球的独立微型游泳机器人
液态海洋位于数千米的冰壳之下,是太阳系中最有可能孕育生命的地方。进入和探索这些水生环境是科学家长期关注的重点。2021年,美国喷气推进实验室(JPL)提出用“独立微型游泳机器人探测”(SWIM)系统来拓展海洋星球的探索,利用多个厘米级的3D打印微型机器人深入海洋冰面下方开展探测。机器人配备传感器,由微型执行器驱动,通过超声波进行无线通信、可单独部署也可以集群部署。
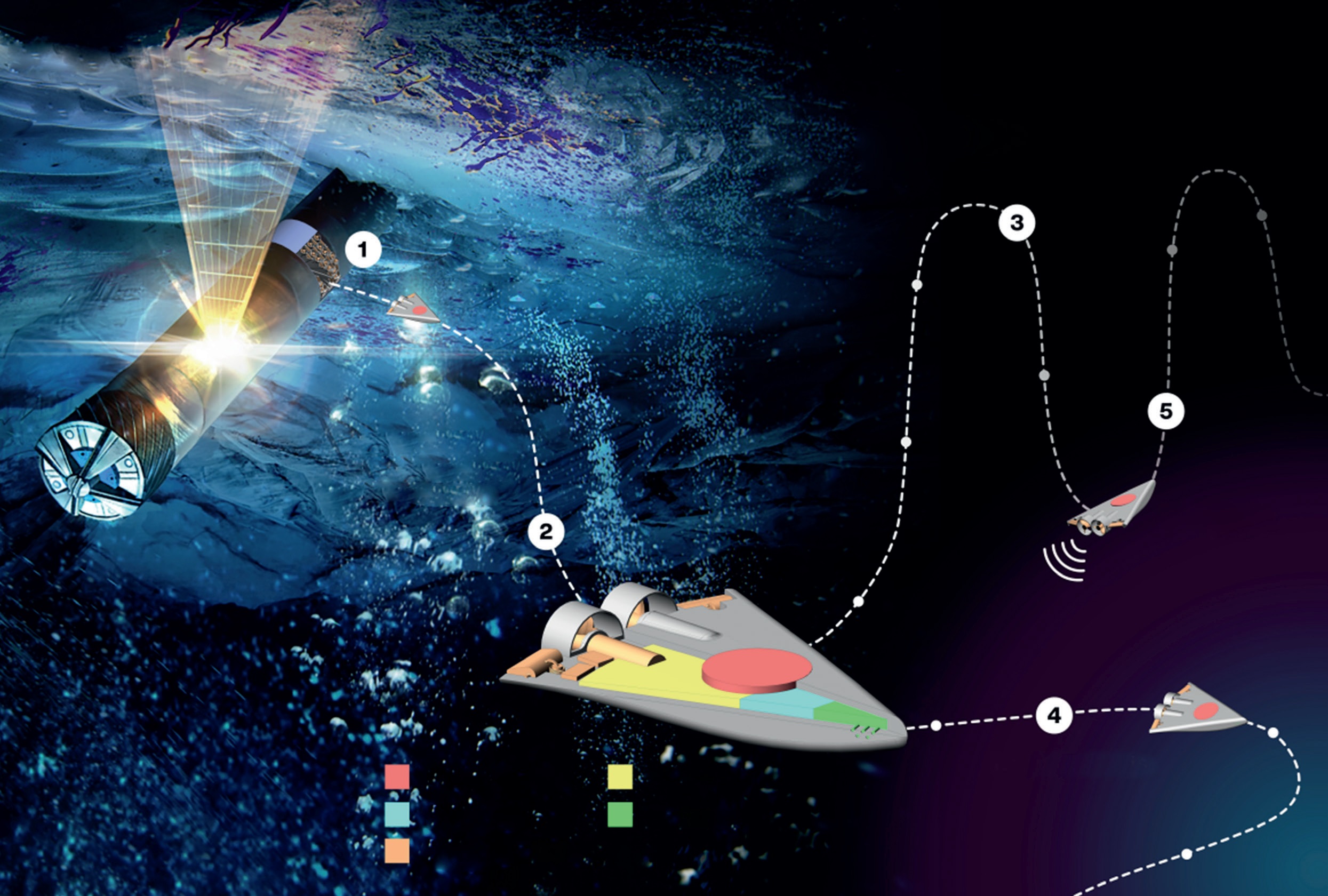
探测海洋星球的独立微型游泳机器人示意图
项目第一阶段,JPL确定了微型游泳机器人的原型设计方案。2022年,该项目成功入选第二阶段资助,研究重点将聚焦以下5个方面:进行三轮原型样机测试,对系统设计不断迭代;通过仿真手段识别满足高可靠性、最少硬件要求的游泳机器人的工作策略;利用商业货架产品实现传感器有效载荷的设计、制造和测试;研发超声换能器节点,测试水中双向通信能力;通过机动/控制性能研发验证水中机动性、状态评估和闭环控制。
作为提升国家基础创新能力、丰富人类认知、拓展人类生存空间的新兴重大科技创新领域,深空正持续受到各主要航天国家的高度关注,成为国际航天活动热点。许多新概念和新技术方案很多都是围绕深空探测展开,这些方案将具有变革作用的创新概念、理念融入深空探索领域必然会促进新理论、新技术的产生,从而拓展人类的认知边界,推动科学技术的进步。
来源: 《太空探索》2022年第8期
