
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 中国宇航学会
中国宇航学会 在空间站任务的历次出舱活动中,空间站机械臂托举航天员到指定位置,辅助航天员完成了各项既定任务,检验了航天员与机械臂协同工作的能力。中国空间站未来的建造和运营中,机械臂将继续“助你一臂之力”,作为空间站核心装备发挥至关重要的作用。
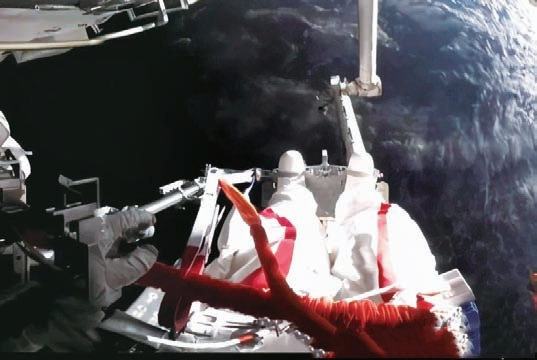
航天员刘伯明站在机械臂上
机械臂研制未雨绸缪
空间机械臂是美国20世纪70年代提出的概念,但把概念变成现实的是加拿大Spar公司。美国航天飞机的4套6自由度空间机械臂都是美国宇航局和Spar公司联合研制的,加拿大MDA公司后续还为空间站研制了更先进和更强大的7自由度的加拿大臂2。中国1992年启动载人航天工程,计划三步走最终建成长期有人照料的载人空间站,我国载人航天发展也紧跟技术发展潮流,开展空间站机械臂的论证和研究工作。
空间站机械臂看起来就是两段“棍子”,但它不仅能辅助航天员出舱活动,在空间站建造和维护,在在轨维护中也发挥着重要作用。它是一种非常精密和先进的空间机器人,集机械、电子、热控以及视觉和动力等多个领域于一身。空间站机械臂既要拖动大质量的载荷,又要保证高控制精度,还要具备视觉识别能力甚至自主分析能力,对于白手起家的研制团队来说研制难度空前。据报道,中国空间站机械臂的新技术比例超过80%,好在中国航天人迎难而上,最终研制出我们自己的大型高性能机械臂。

在地面进行研发试验的空间站核心舱机械臂
我国从20世纪80年代开始跟踪空间机械臂技术,开展了多个机械臂预研和演示项目。中国空间技术研究院自2005年开始机械臂研究工作,2007年完成机械臂原理样机设计,2009年完成工程样机设计,而中国空间站是2010年才正式立项的。航天人未雨绸缪开展机械臂研制,为空间站的研制工作打下了坚实的基础。2008年完成6自由度空间站原理样机研制后,又进一步开展7自由度机械臂的研制,让中国空间站的机械臂达到了国际领先水平。

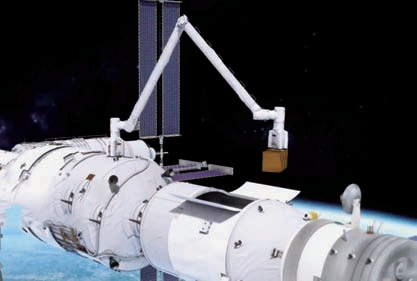
天宫空间站效果图,上面有机械臂
中国机械臂性能先进
空间站机械臂是中国空间站系统的四大关键技术之一,它随天和号核心舱发射升空,并在首次出舱任务中得到应用。严格地说,中国空间站远程机械臂系统包括核心舱机械臂CMM和实验舱机械臂EMM两个部分,助力航天员出舱的是核心舱机械臂。中国空间站机械臂性能强大技术先进,是空间站建造应用的好帮手。
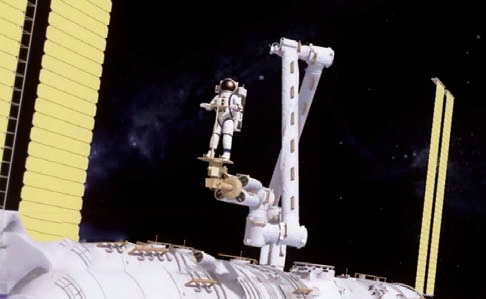
机械臂辅助航天员出舱活动
中国空间站核心舱机械臂主要用于完成重型舱段和载荷的搬运拖带,以及大范围转移等任务,可以实现空间站舱段的转位和辅助对接,航天器的捕获和辅助对接,以及拖动航天员辅助舱外活动等功能。核心舱机械臂质量约738千克,长度约10.2米,作为一种7自由度空间站机械臂,可以完美模拟人体胳膊的活动能力,是当之无愧的太空“大臂”。核心舱机械臂还采用大负载自重比设计,最多可以拖动25吨的载荷。核心舱机械臂还有重定位能力,形象地说就是能头尾互换地进行“爬行”,和尺蠖蠕动爬行十分相似。空间站核心舱和实验舱上都装有电力数据适配器,在它们的配合帮助下机械臂可以在3个核心舱段之间灵活移动,大大扩展了任务灵活性和活动范围。
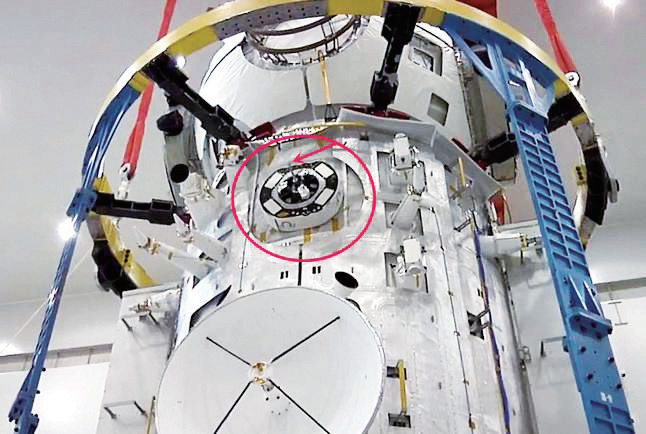
天和核心舱外的机械臂适配器
空间站实验舱的小型机械臂也是一种7自由度机械臂,它长度约5米,最大负荷能力可达3吨,其拖动能力虽然远逊核心舱机械臂,但它主要用于照料实验舱的舱外实验设施,设计上姿态和位置精度更高,可以执行更灵巧的操作。实验舱机械臂也可以支持航天员舱外活动,但它并没有搬运舱段的使命,也无需为了高指标设计得能力过剩。实验舱机械臂和核心舱机械臂既可以各自独立运行,也具备双臂组合操作模式,实现了大范围大负载和局部精细化操作的统一。毫不夸张地说,中国空间站机械臂系统已经达到了国际先进水平,整体水平足以媲美空间站机械臂的标杆加拿大臂2。
中国空间站的好助手
机械臂是中国空间站的支撑性核心装备,可以对空间站舱外目标进行抓取、搬运、定位和释放,不仅满足舱外实验活动的需求,还能协助航天员进行在轨建设和维护。机械臂还能用于观察和监视舱外静止或移动的目标,包括对空间站舱段外部进行检测。总而言之,空间站机械臂用途广泛,也难怪它居然成了空间站的四大核心装备之一。

机械臂监视来访飞行器
首先我们来看核心舱机械臂。核心舱机械臂系统已经展示了辅助航天员出舱活动的能力,航天员使用脚限位器把自己固定在机械臂末端,可以借助机械臂的帮助快速进行大范围转移。我国空间站机械臂的移动线速度最大可达0.6米/秒,理论上移动10米最快只需要十几秒,这要比出舱任务中汤洪波花了约20分钟才爬完10多米距离快得多。机械臂不仅移动速度快,而且极大地节省了航天员舱外活动的体力消耗,还能更灵活地将航天员送到预定位置,为航天员舱外活动提供高效和有力的支持,它在未来的空间站建设和运营阶段将继续用于辅助和增强航天员出舱活动能力。
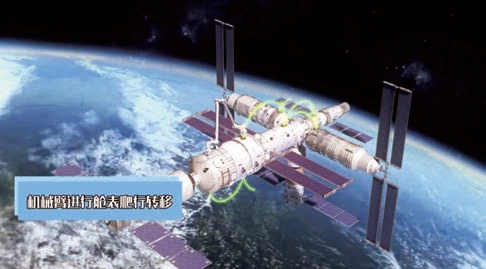
机械臂进行舱表爬行转移
核心舱机械臂另一个重要作用是用于空间站舱段和来访航天器的辅助对接。我国空间站三舱基本构型中两个实验舱都要轴向对接后,再转位移动到节点舱侧面的对接口上,机械臂高达25吨的拖动能力,就是为了满足拖动空间站实验舱的转位对接要求。机械臂同样能用于巡天号光学舱的捕获和辅助对接,方便对光学舱的在轨维护,未来还能用于捕获商业货运飞船辅助对接,降低商业公司研制对接系统的难度。核心舱机械臂还能用于检查空间站舱段的舱外状态。基于舱外的电力数据抓取夹具,机械臂可以在各个舱段之间爬行,再加上机械臂末端配置的相机等视觉系统,可以实现对空间站外表的定期巡检,通过实时拍摄的影像供航天员和地面控制人员观察判断舱体的状态,尤其是是否有微流星撞击孔洞或是金属疲劳后产生的裂缝。
中国空间站的实验舱机械臂小巧灵活,主要用于更为精细的操作任务。我国空间站核心舱和实验舱都装有安装舱外暴露平台的接口,未来将使用实验舱机械臂完成安装和更换舱外暴露载荷的任务。空间站舱外的其他设备,比如对地观测相机或是天文观测载荷以及在轨可更换单元,也需要实验舱机械臂承担安装、更换和维修的重任。实验舱机械臂还用于照料昂贵的巡天光学舱,为它更换和维修控制模块,维护遮光罩和其他设备。另外,对于为空间站提供大部分电力的实验舱太阳翼,同样需要在实验舱机械臂支持下,通过舱外活动维护桁架、太阳翼及其驱动机构。实验舱机械臂的这些功能,不仅有效减少了出舱活动的任务量,对完成舱外空间科学实验也是至关重要的。实验舱机械臂还能和核心舱机械臂组合起来,更好地完成从照料舱外暴露平台到搬运维护太阳翼等各种活动。
机械臂转移货运飞船载荷
来源: 《太空探索》2021年第9期
