
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 磁悬浮中国
磁悬浮中国 磁浮轴承系统主要由被悬浮物体、传感器、控制器和执行器四大部分组成。其中执行器包括电磁铁和功率放大器两部分。下图1是一个简单的磁浮轴承系统,电磁铁绕组上的电流为I,它对被悬浮物体产生的吸力和被悬浮物体本身的重力相平衡,被悬浮物体处于悬浮的平衡位置,这个位置也称为参考位置。
假设在参考位置上,被悬浮物体受到一个向下的扰动,它就会偏离其参考位置向下运动,此时传感器检测出被悬浮物体偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器使流过电磁绕组上的电流变大,因此,电磁铁的吸力也变大了,从而驱动被悬浮物体返回到原来的平衡位置。如果被受到一个相上的扰动并向上运动,此时控制器和功率放大器使流过电磁场铁绕组上的电流变小,因此,电磁铁的吸力也变小了,被悬浮物体也能返回到原来的平衡位置。因此,不论被悬浮物体受到向上或向下的扰动,下图中的球状被悬浮物体始终能处于稳定的平衡状态。
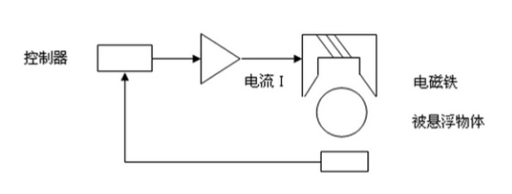
图1被悬浮物体的工作原理示意图
没有主动控制,被动永磁系统不可能将物体稳定悬浮于某个位置。尽管如此,永久磁铁仍然可以在某一个自由度,用于支承物体或者辅助减轻传统轴承的负荷。这样的永久磁铁已被广泛地应用到例如家用电表中。此外它还可以结合主动式磁轴承来进行一些其他的应用,例如应用于制造超高真空的涡轮真空分子泵中,被称为所谓的混合轴承。
来源: 科技文献总结
