
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 磁悬浮中国
磁悬浮中国 主动磁悬浮系统由五部分组成:位置传感器、执行电磁铁、被悬浮体、功率驱动放大器、控制器。其具体的原理框图如图1所示。主动磁悬浮系统的原理为:假设转子在给定位置稳定运行,突然系统受到一个小的扰动时,转子偏移了给定位置。此时,位移传感器检测到转子位移偏差并传送给控制器。控制器将数字信号传送给功率放大器使其原来的电流i0,经过调节变为i0±i(正负由转子位移的偏差决定),从而实现转子位移的闭环控制,使其复位、稳定运行。
采用闭环主动控制方式使悬浮体的姿态、动静态特性等达到期望要求。即:连续地或断续地测量悬浮体的位置,通过伺服装置迅速地控制场力,使悬浮体相对其要求位置的偏移不超过应许的范围。
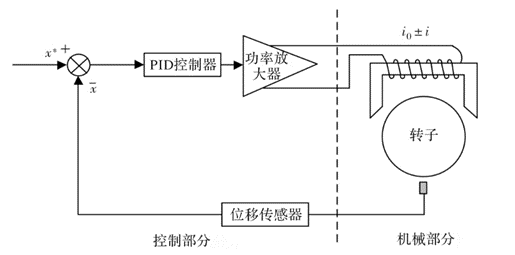
图1主动磁悬浮系统原理示意图
主动式磁悬浮轴承
主动磁力轴承按控制方式的不同可分为电流控制和电压控制,按支承方式的不同可分为径向磁力轴承(图2(a)),轴向磁力轴承 (图2(b))。目前,在主动磁力轴承中,应用最广泛的是直流控制型磁力轴承。由于主动磁力轴承具有转子位置、轴承刚度和阻尼可由控制系统确定等优点,所以在磁悬浮应用领域中,主动磁力轴承得到了最为广泛的应用,而且主动磁力轴承的研究一直是磁悬浮技术研究的重点。经过多年的努力,其设计理论和方法已经日趋成熟。 因此在磁悬浮轴承技术研究中,主动式磁悬浮轴承的研究一直是研究的热点,同时在工业领域中应用最为广泛。


(a)径向磁悬浮轴承 (b)轴向磁悬浮轴承
图2主动式磁悬浮轴承
来源: 科技文献总结
