
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 清华高端院科普中心
清华高端院科普中心 纺织行业作为我国国民经济的支柱产业和重要的民生产业,正处于转型升级的关键时期。整个行业面临人口红利消失、原材料价格上涨、环保压力增大、出口缩减等现实问题。其中,人力成本长期居高不下,是纺织业目前面临的痛点难点问题。纺织产业是典型的劳动密集型产业,劳动力优势让中国成为世界第一大纺织品出口国,但从2012年开始,随着我国人口红利逐渐消失,人工成本逐年提高。调查显示,东南沿海地区纺织厂工人工资集中在5000-10000元,中西部地区工人工资大致在3000-6000元左右,人工成本在纺织类公司总成本的占比已经从20%迅速飙升到了60%。纺织行业工作内容很辛苦,80后基本慢慢退下,90后不想做,00后更不愿涉足。另外劳动人口减少,员工不稳定,流动加快造成额外费用等,也是纺织企业面临的难题。

面对诸多发展困境,我国纺织行业积极求变,加快新旧动能转换,以智能制造为手段,推动纺织行业由“大”向“大而强”的转型发展,谋求在部分领域实现突破并引领世界。借力“人工智能”、“互联网+”、“大数据”在纺织行业的创新应用,加快新一代信息技术与纺织业融合的创新发展已经成为大势所趋,结合持续的科技创新,推动纺织产业向绿色低碳、数字化、智能化和柔性化等方向发展,是实现这一伟大转变的必由路径。
清华大学天津高端装备研究院智能绿创装备研究中心长期致力于智能制造与绿色环保创新技术的科技成果转化工作,专注于各个行业自动化装备的研发与创新,旨在利用自动化设备代替人工,减轻工人劳动强度,提升设备生产效率。今天,小编带大家了解的是由该中心科研人员研发的在纺织行业可以替代人工上纱的智能化络筒机自动上纱系统。

【国内现状】
自二十世纪八十年代起,我国开始引进和研制自动络筒机,自动络筒机实现了络筒工序中多个工作步骤的自动化,降低了工人的劳动强度,提高了生产效率。络筒是纺纱过程的最后一道工序,将小容量的管纱连接起来,做成大容量的筒纱,供后续的织造使用。但是在将管纱放置到络筒机的纱库中这一步骤始终还需要人工操作。工人推着装有管纱的小车在络筒机前巡回,向纱库中插管纱,这一步骤被称为上纱,一个工人需要负责多条络筒机生产线的上纱工作,劳动强度大。由于工作环境存在高粉尘、高湿度和高噪音等问题,纺织企业“招工难”、“用工贵”的问题日益突出。因此,研制络筒机的自动上纱系统已成为纺织行业的一项现实需求。

【实现功能】
络筒机自动上纱系统主要由视觉、移动、储存和抓取四个模块组成。实现功能所需步骤如下:
1、自动导航车沿铺设在地面的磁性轨道线,在车间中巡航;
2、在接到需要给某一络筒机上纱的指令后,运动至指定的络筒机纱库旁;
3、计算机视觉模块拍摄自动络筒机纱库的图像,运行深度学习算法,识别并定位没有管纱的纱库空位;
4、计算机视觉模块拍摄周转箱内的图像,运行深度学习算法,预测管纱的掩码和关键点,计算出管纱的抓取点;
5、如果检测出图像中有多个可抓取的管纱,则根据抓取策略,对各管纱的抓取点排序,选择最优抓取目标;
6、机器人抓取管纱;
7、机器人将管纱放入纱库的空位中。
由于管纱在放入纱库后还需要进行管纱找头工作,为提高络筒机整体运行效率,科研人员在后期还会在自动上纱系统上增加找头机构,从而节省络筒机找头时间。每个模块所实现的功能及样机整体结构如下图所示:

【科技创新】
1、首创使用关节机器人进行纱管的夹取与放置,结构轻便灵活。
当前产品大多数通过传统机械结构实现管纱的运输与放置,这样的结构就要求管纱需要整齐的摆放在周转箱中,会多出摆放管纱时间,同样需要较多的人工来实现。且传统的机械结构过于笨重,导致机器整体较大,制造成本高。

2、采用图像识别技术,改进计算机视觉算法。
对现有算法进行改进与优化,使设备识别效率明显提高,可快速判断抓取位置,并快速识别纱库空位。
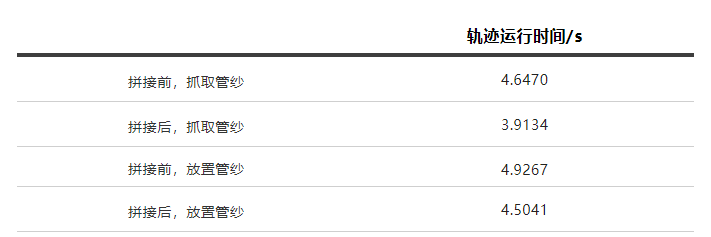
3、改进关节机器人路径规划。
通常情况下为减小计算量,关节机器人的运动轨迹会被分为多段分别进行计算,再分别执行,这就造成了机器人的频繁启停,会影响机器人的工作效率。此款设备在设计中将分段分别计算的轨迹拼接在了一起,有效地提升了机器人的运行效率。
4、吸盘结构提升抓取成功率。
在夹爪上添加吸盘结构,在夹爪夹取管纱前吸盘将管纱吸住,并随滚珠丝杠提起,保证在即使多个管纱重叠,夹爪也能顺利夹起管纱。


5、自动电量检测,自动充电。
设备上配电池管理系统(BMS),降低设备能耗,并在电量用尽后自动前往电源处进行自动充电。
6、多种导航方式可选。
此套系统开发了包括磁导航,激光雷达导航在内的多种导航方式,可适用于不同厂房的不同需求。
【应用价值】
据中国纺织机械协会统计,我国环锭纺纱锭数已超过1.2亿锭,其中85%以上应用了自动络筒机,其中近80%为纱库式自动络筒机,以每千纱锭配置1条纱库式自动络筒机生产线计,则纱库式自动络筒机生产线数量有约81600条,且当前还没有出现非常实用的自动上纱系统,因此此套系统有很大的发展潜力。
基于此套系统研发的计算机识别算法以及机器人路径规划算法适用不仅适用于纺织领域,这些算法可以适用于不同的抓取场景,同时也可以引导机器人在物体散乱且密集的场景中抓取目标,为机器人在复杂场景下的抓取问题提供一个解决方案。
来源: 原创
