
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 京水野救护
京水野救护 如果您觉得本文章有趣,请关注本公众号,下期更精彩
如果将你的双眼蒙住,你还能准确地辨识方向,行动自如或者躲避危险吗?想必大多数人会是举步维艰。但在自然界中,不论是广袤海洋中的漆黑海域还是幽深洞穴里伸手不见五指的黑暗环境,都有很多鱼类早已适应了“用进废退”的自然法则,在视力严重退化的情况下,仍然能够迅捷地躲避天敌、准确地捕捉食物甚至进行长距离洄游。为什么鱼类拥有这种特殊本领呢?这就有赖于神奇的鱼类侧线感受系统。
什么叫侧线系统?简单地说,它是鱼类和两栖类(幼体阶段)特有的一类感觉系统。我们常见的鱼类大多具有较为明显的侧线特征(图1)。
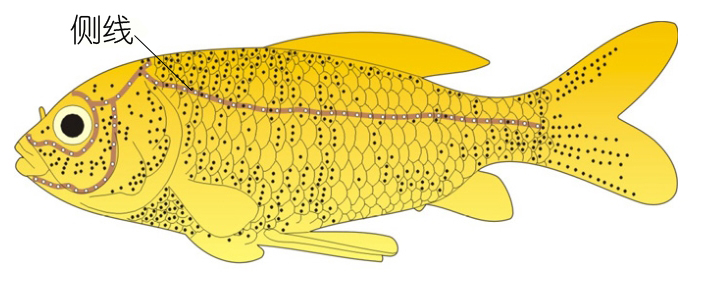
图1 金鱼的侧线系统,棕色线代表侧线分布|改自文献[1]
鱼类的侧线系统分为机械感受系统和电感受系统,这里我们主要介绍机械感受系统,它主要对环境中水流和水压的变化异常敏感,这对鱼类的生理行为有着极为重要的意义,其感受功能单位称为神经丘,由毛细胞、支持细胞和套细胞组成(图2所示)。科学家们发现,每个神经丘中所有毛细胞的顶端都会伸入一个透明的胶质顶中。当接收到外界环境变化信号时,胶质顶将产生一定幅度的偏转,并逐步传导至动纤毛和静纤毛,继而发生偏转并引发离子穿过毛细胞膜,激发兴奋性反应[2]。
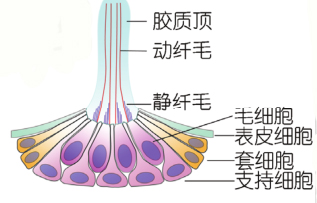
图2 神经丘结构示意图|文献[3]
这些神经丘主要分布在鱼类的侧线管道内和鱼体表面,根据不同的位置,我们将其称为“管道神经丘”和“表面神经丘”,图1中的白点为管道神经丘,黑点则为表面神经丘。
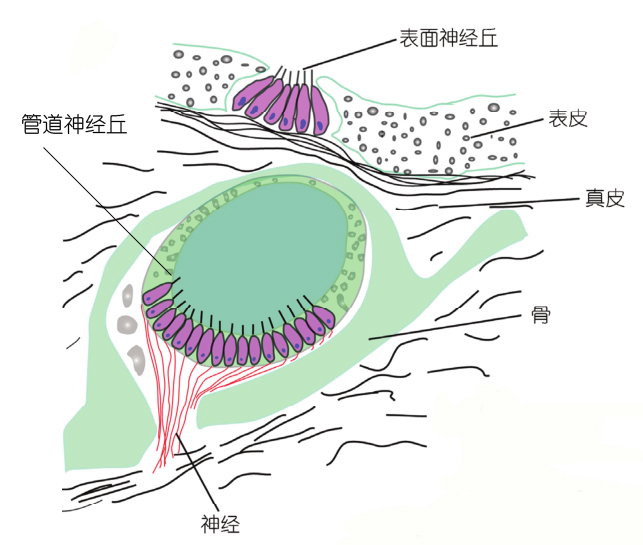
图3 神经丘的形态结构|文献[4]
为什么侧线感受系统能够高效准确地感知时间和空间的微小变化呢?经研究发现,鱼类管道神经丘主要感受压力差的变化,可精确至mPa级别(相当于一根鸿毛落在一平米物体上,鸿毛对物体产生的压力),通常接受频率较高的刺激(60~120 Hz)[5];而表面神经丘主要感受水体流速的变化,可精确至um/s,一般接收频率较低的刺激(20~60 Hz)[6]。由此,鱼类可以通过侧线系统对压力源或改变流速的物体其尾迹涡旋产生的流体场和机械振动进行感知,进而迅速响应,完成捕食或躲避等行为。这种高灵敏度和高精确度的反馈系统在仿生学上也有着广泛的应用前景。下面我们来看看具体的应用实例。
实例1.人工侧线系统的开发应用
要想成功研发一套人工侧线系统,其中最关键的组件就是传感器。目前,传感器主要分为塑性变形磁组件和微电机组件,其原理主要依据热线风速仪原理、压电效应和光学读出原理等。2006年,美国伊利诺伊大学的Yang等人设计了人工侧线系统(图4),其使用的微型传感器就采用了热线风速仪原理,其“悬臂”的结构可以感受流体的振动。通过将传感器组合成一定规模的阵列,进而识别外界环境刺激中微弱振幅和频率的变化,最终实现对外部环境的3D构建[7]。这样一套系统的建立,从单个传感器的尺寸、设计原理到排列方式都和鱼类侧线感受系统有着异曲同工之妙。
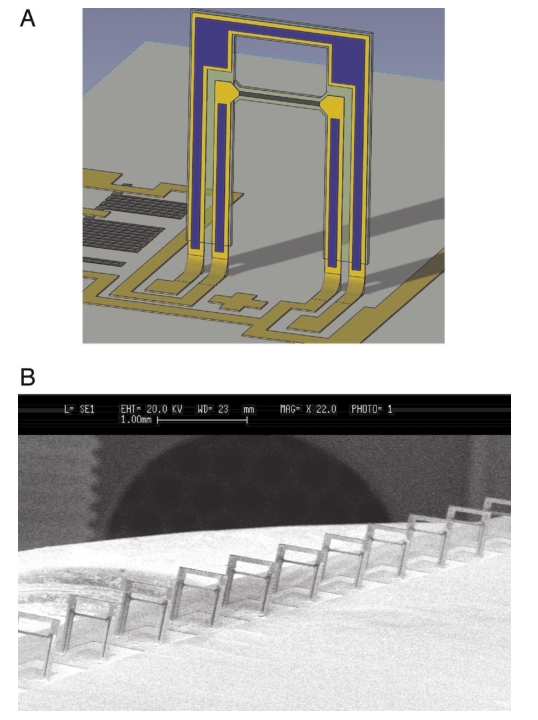
图4 A:基于热线风速仪原理的微型传感器|文献[7]
图4 B:间距1mm的16个热线风速仪传感器扫描电镜照片|文献[7]
此后,Yang等人在设计的人工侧线系统中(图5),利用微机电系统,将人工侧线神经丘排布于圆柱形装置表面,从而精确定位刺激源的位置[1]。图5-A是柱状装置表面的仿生神经丘布局结构,5-B是扫描电镜下的仿生神经丘示意图,柱状的聚合物毛发位于桨状悬臂的远端,使其形成压敏电阻器。5-C是仿生神经丘的工作原理,即在水流刺激下柱状聚合物发生倾斜导致悬臂梁弯曲,从而产生阻力。由此,压敏电阻会发生变化(红色区域)并产生模拟信号,最终通过接线进行输出(黄色部分)。

图5 人工侧线系统|文献[1]
实例2.仿生水下机器鱼的应用
随着人工侧线系统的逐渐成熟和传感器制作工艺的不断提高,更多先进的流速传感器和压力传感器被装备在仿生水下机器人上,使其更加自主和智能化。仿生机器鱼是人工侧线系统和现代智能机器人技术高度融合的产品,相比其它水下机器人,机器鱼的传感器使其在遥控和运动方面更加自如,具备推进效率高、机动性强、隐蔽性好等优点。
美国麻省理工学院的Robert K. Katzschmann,等人研发了一种可在水下灵活操作的仿生机器鱼[8]。图6上方由左至右是仿生机器鱼的整体结构和转向接口模块,下方由左至右是柔软弹性的尾部(切面)、外齿轮泵、浮力控制单元、潜水翼以及可控制的电子设备包括声音接收器和鱼眼照相机,并成功在海底进行了实测(图7顺时针方向依次是仿生机器鱼的直线游动、垂直下潜、左转向和右转向)。图8则是机器鱼在海底珊瑚礁区域进行的人工遥控勘测工作。
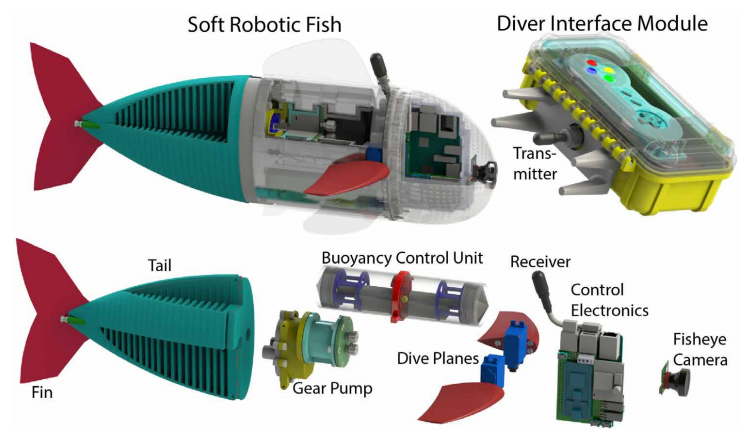
图6 水下仿生机器鱼的结构|文献[8]
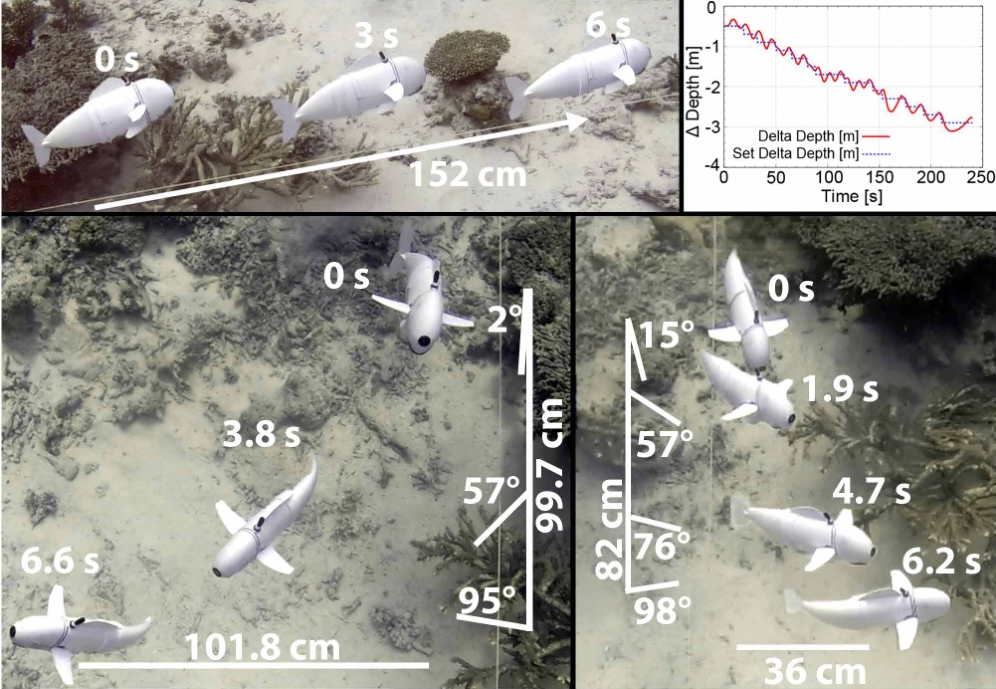
图7 仿生机器鱼的水下测试|文献[8]
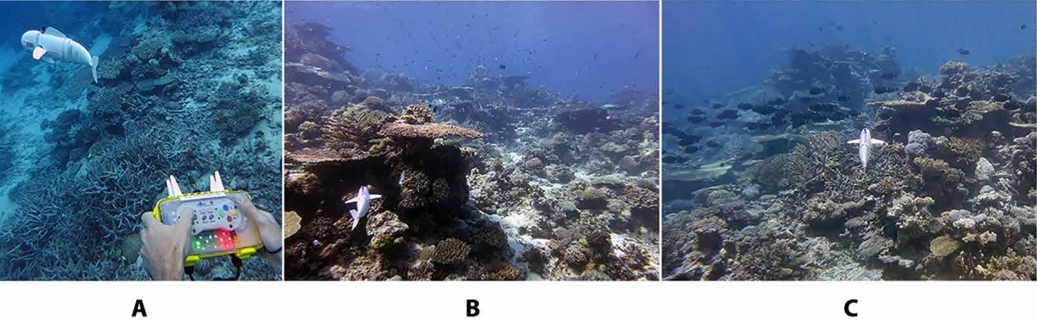 图8 A:仿生机器鱼的水下遥控 B:在珊瑚礁进行勘测 C:仿生机器鱼在海洋动物中畅游|文献[8]
图8 A:仿生机器鱼的水下遥控 B:在珊瑚礁进行勘测 C:仿生机器鱼在海洋动物中畅游|文献[8]
众所周知,地球超过三分之二的面积都被海洋覆盖,海洋中蕴含有丰富的资源,人类对海洋的探索活动也将越来越频繁。我们有理由相信,在不远的将来,人工侧线系统的不断完善和仿生智能机器人的开发会在海洋基础研究、海洋勘探开发和海洋环境保护等领域具有重要的应用价值。
了解更多水生生物知识,敬请关注公众号:京水野,微信号bawrcc,有你下期更精彩。
[1] Yang Y, Nguyen N, Chen N, et al. Artificial lateral line with biomimetic neuromasts to emulate fish sensing. Bioinspir Biomim, 2010, 5:016001.
[2] 李超, 王晓杰, 宋佳坤.鱼类的侧线机械感受系统和仿生学等应用研究[J].科学通报,2017,62(22):2509-2519.
[3]Webb J F. Morphological diversity, development, and evolution of the mechanosensory lateral line system. In: Coombs S, Bleckmann H,Fay R R, eds. The Lateral Line System. New York: Springer, 2013. 17–72.
[4] Nagiel A, Andor-Ardó D, Hudspeth A J. Specificity of afferent synapses onto plane-polarized hair cells in the posterior lateral line of the zebrafish. J Neurosci, 2008, 28: 8442–8453.
[5] Münz H. Single unit activity in the peripheral lateral line system of the cichlid fish Sarotherodon niloticus. J Comp Physiol A, 1985, 157:555–568.
[6] Kroese A B A, Schellart N A M. Velocity- and acceleration-sensitive units in the trunk lateral line of the trout. J Neurophysiol, 1992, 68:2212–2221.
[7] Yang Y, Chen J, Engel J, et al. Distant touch hydrodynamic imaging with an artificial lateral line. Proc Natl Acad Sci USA, 2006, 103:18891–18895.
[8] Robert K. Katzschmann, Joseph DelPreto, Robert MacCurdy, et al. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 3, eaar3449 (2018).
来源: 北京市水生野生动植物救护中心

