
 科普中国公众号
科普中国公众号
 科普中国微博
科普中国微博

 帮助
帮助
 博科园
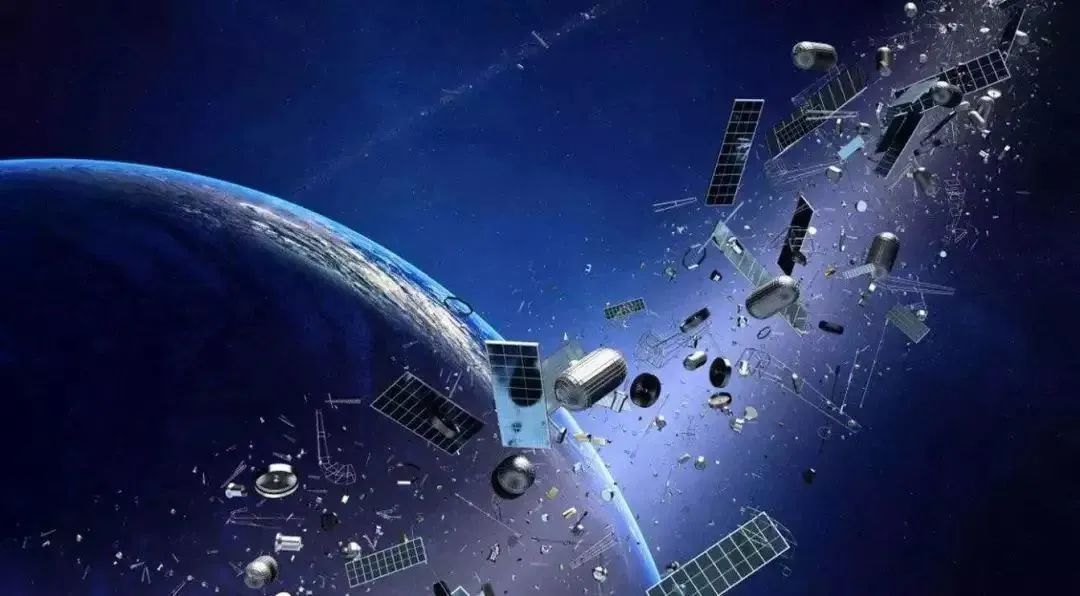
博科园 随着人类将视野扩展到地球以外,并开始考虑延长持续时间的空间任务,可持续性需要发射更多的航天器,从而增加与现有空间碎片太空垃圾相撞的风险。清除这些残骸碎片的一种方法是用“拖车拖曳”将其拖到安全区域。在《欧洲物理杂志》上发表的一篇新研究论文中,来自巴西巴伊亚州费拉德桑塔纳州立大学的科学家对“拖车拖曳”清理空间碎片的复杂会合动作进行了模拟。
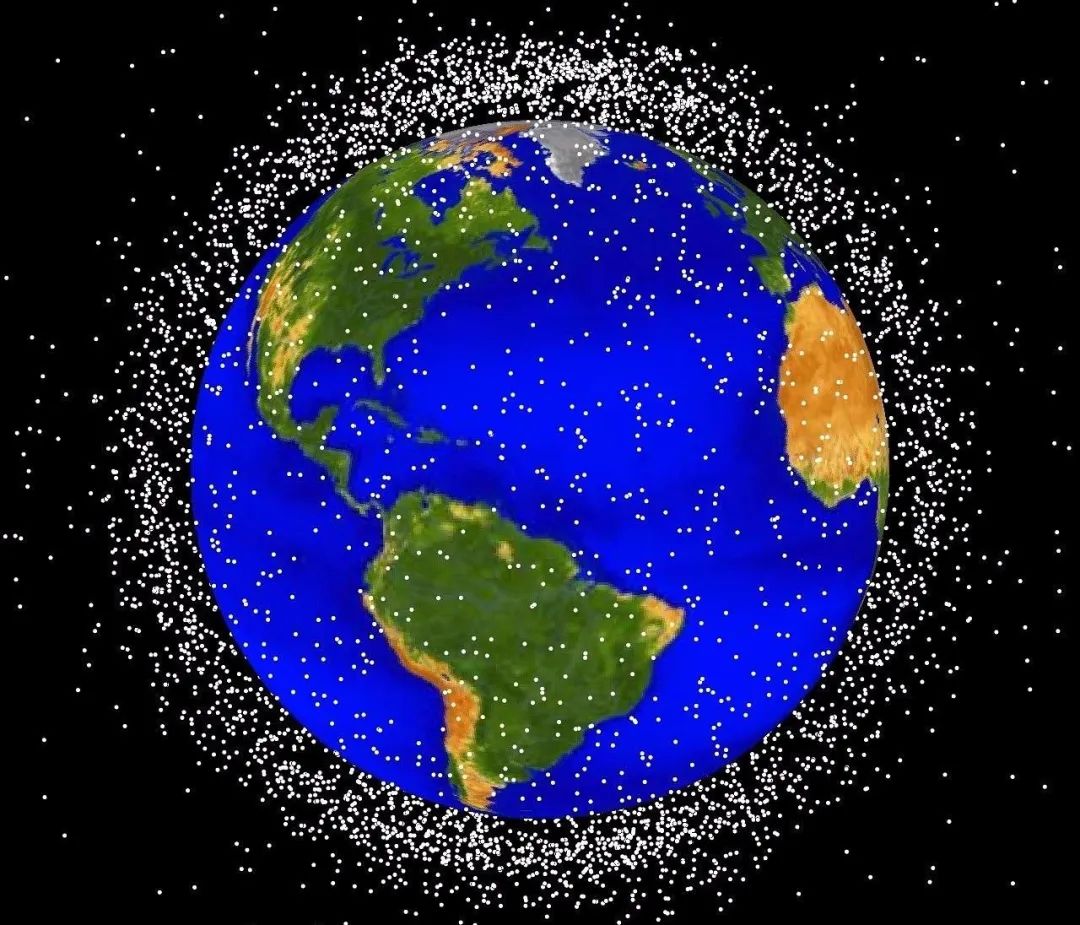
以降低碰撞的风险,碰撞可能在耦合的时刻造成无法弥补的损害。正如研究作者指出的那样,太空任务发生在一个由大约3600颗人造卫星组成的环境中,其中不到三分之一的卫星正在运行。非运行单元容易泄漏、爆炸和碎裂,进一步散落在地球周围地区-特别是在低地球轨道(LEO)。一次碰撞不仅会造成无法弥补的损害,还会产生更多的空间碎片,可能会阻碍进一步的任务。
这使得清理这些残骸的拖曳操作变得可取,但也很危险。研究了如何使用推进系统来控制围绕地球进行会合机动中物体的相对速度和位置。这种操作要求拖曳和碎片在连接时刻的速度和相对位置为零。de Jesse和Santos通过多变量张量方程的解检查了这些操作参数,发现空间碎片拖曳工具的相遇机动可以在最短时间内进行,而且由于同时使两个物体的速度和相对最终位置为零而产生同步。
当然,空间物体之间的成功连接可以应用于更多情况,而不仅仅是空间碎片的移动。连接飞行器可能成为可持续长期太空任务发展的重要组成部分。航天器容易与空间碎片相撞,随着发射率的不断增长,发生灾难性事故的可能性也在增加。缓解措施包括派遣拖车,试图捕捉碎片并将其带到大气拖曳活动区域。交会机动需要安全操作,考虑到在车辆之间耦合的时刻,在SpaceClean的操作中,以及其他操作中发生碰撞的风险。

完美的交会是在相对速度和位置为零的情况下完成,但这一条件需要以足够的技术精度来实现。在这项研究中,通过求解一个多变量方程,找到了同时和最小时间交会机动的条件和推进技术参数。
博科园|www.bokeyuan.net
博科园|研究/来自:Springer
参考期刊《欧洲物理杂志》
DOI: 10.1140/epjst/e2020-900194-x
博科园|科学、科技、科研、科普
关注【博科园】看更多大美宇宙科学
来源: 博科园|www.bokeyuan.net

